img031
31
Rozdział 3. Liniowe sieci neuronowe
jest aprioryczne ustalenie wektora W lub macierzy W* odpowiednich dla rozwiązywania za pomocą sieci neuronowej jakiegoś złożonego zadania. Na szczęście istnieje możliwość zastąpienia jednorazowego aktu zaprogramowania sieci iteracyjnym. wieloetapowym procesem jej uczenia. Aby zapewnić możliwość uczenia, trzeba wprowadzony wyżej model neuronu uzupełnić o dwa dodatkowe elementy: procesor zmiauy wag i detektor błędu. Tak uzupełniony neuron nazywany bywa ADALINE (ADAptine LINear Element) i wykazuje za-stanawiająco bogate możliwości w zakresie dostosowywania swojego działania do wymagań wynikających z postawionego zadania. Załóżmy, że zadanie stawiane ADALINE polega na tym, by sygnał wyjściowy y był związany z sygnałami wejściowymi X pewną zależnością funkcyjną
y = /(X)
Funkcja / nie musi być zadana w sposób jawny; wystarczy, że dla każdego konkretnego wektora wejściowego potrafimy wskazać konkretną wartość z = /(X) stanowiącą nasze żądanie odnośnie sygnału wyjściowego y.
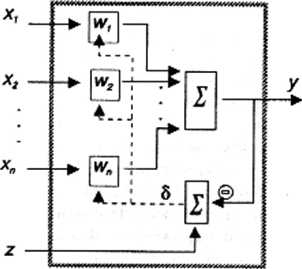
Zasada działania ADALINE przy rozwiązywaniu tego zadania oparta jest na podstawowym algorytmie uczenia, wprowadzonym przez Widrowa i Hofta [WidrfiO]. Algorytm ten, nazywany regułą DELTA, zakłada, że wraz z każdym wektorem wejściowym X do neuronu podawany jest sygnał opisany wyżej jako zadana (wymagana) odpowiedź nauronu na sygnał X. Neuron odpowiada na sygnał X sygnałem y = W * X, przy czym jeśli neuron nie jest nauczony, sygnał ten jest inny, niż wymagany (1/ ^ z). Wewnątrz neuronu ADALINE istnieje blok oceniający wielkość błędu
6 = z - y
Blok ten składa się z inwertora (dla uzyskania z sygnału y sygnału -y) oraz sumatora. Na schemacie, funkcję inwertora zasygnalizowano symbolem O przy odpowiednim wejściu sumatora. Na podstawie sygnału błędu f> oraz wektora wejściowego X możliwe jest takie
Wyszukiwarka
Podobne podstrony:
img035 35 Rozdział 3. Liniowe sieci neuronowe albo prościejv 3)=ww gdzie A jest pewną ustaloną stalą
Sieci CP str035 35 Rozdział 3. Liniowe sieci neuronowe albo prościej „<>> = —_— v
img037 37 Rozdział 3. Liniowe sieci neuronowe pokazano jedynie oczy i usta). Takie zadanie nazywa si
img029 29 Rozdział 3. Liniowe sieci neuronowe że neuron rozpoznaje1 sygnały wejściowe, wyróżnając te
img037 37 Rozdział 3. Liniowe sieci neuronowe pokazano jedynie oczy i usta). Takie zadanie nazywa si
img039 39 Rozdział 3. Liniowe sieci neuronowe mu taką strategię liczenia, by zapamięta] i potrafi! p
img041 41 Rozdział 3. Liniowe sieci neuronowe dopasowanie wektora wag do rozpoznaw
img043 43 Rozdział 3. Liniowe sieci neuronowe3.9 Uczenie z forsowaniem Opisane wyżej techniki samo u
img045 45 Rozdzinl :i. Liniowe sieci neuronowe ma na ogól niewielką wartość, ponieważ poszczególne s
img047 47 Rozdział 3. Liniowe sieci neuronowe nazywanej skumulowanym błędem. Wartości skumulowanego
Sieci CP str037 37 Rozdział 3. Liniowe sieci neuronowe pokazano jedynie oczy i usta). Takie zadanie
więcej podobnych podstron