K 367a
Profesjonalny sterownik obrotow silników prądu stałego
Nowy Elektronik 367-K
Sterowanie obrotami silników można zrealizować w sposób elektroniczny na dwie możliwości. Pierwsza prosta polega na zmniejszaniu napięcia (prądu) zasilającego silnik. Metoda ta ma jedną zasadniczą wadę. Wraz ze zmniejszaniem obrotów gwałtownie spada moc silnika. W skrajnych przypadkach silnik może nawet się zatrzymać, przy gwałtownym zwiększeniu obciążenia.
Druga metoda pozbawiona jest wady pierwszej. Sterowanie silnika odbywa się znamionowym napięciem zasilania, ale jest ono podawane w impulsach. W zależności od szerokości impulsu, możemy zmniejszyć lub zwiększyć obroty silnika. Metoda ta pozwala do minimum zredukować spadek mocy silnika przy znacznym zredukowaniu prędkości obrotowej.
Nasz sterownik oprócz regulacji szerokości impulsów posiada jeszcze możliwość ustawienia częstotliwości impulsów. Ta dodatkowa opcja czyni sterownik bardzo uniwersalnym. W praktyce nadaje się oń do sterowania każdym silnikiem prądu stałe-
Budowa i działanie
Układ został wykonany na mikrokontrolerze Attiny26. Jest to mały mikrokontroler z rodziny AVR firmy Atmel. Wybór padł na ten mikrokontroler ze względu na sprzętowy generator PWM (modulator szerokości Impulsów), wewnętrzną pamięć EEPROM. Sprzętowy generator znacznie uprościł program. Zamiast pisać od podstaw cały algorytm, a później program, wystarczy wpisać odpowiednie wartości do pięciu rejestrów i wszystko prawidłowo działa. Impulsy z wnętrza mikrokontrolera podawane są na wyjście PB3 (PIN4), a następnie na układ konwertera napięcia (z +5V na +12V) wykonanym na trzech tranzystorach T1-T3). Konwerter napięcia jest niezbędny. Gdybyśmy go pominęli, nie można by w pełni otworzyć tranzystora kluczującego T4. Napięcie, jakie potrzebne jest do pełnego otwarcia T4 wynosi minimum 10V. Gdy jest poniżej 10V tranzystor zaczyna się mocno grzać.
Do wyświetlania częstotliwości pracy został użyty wyświetlacz siedmiosegmentowy LED. Wyboru częstotliwości dokonuje sie mikroprzełącznikiem St, a zatwierdzenie S2. Również tymi samymi przełącznikami wybieramy szerokość impulsów. Jak to możliwe? Otóż aby wybrać częstotliwość pracy sterownika wciskamy S1 i włączamy napięcie zasilania. Mikrokontroler na wyświetlaczu zapali trzy poziome segmenty. Puszczamy S1 i powtórnie wciskając go wybieramy interesującą nas częstotliwość.
Wskazania wyświetlacza oraz odpowiadającą im częstotliwość możemy zobaczyć w tabeli 1
Cyfra Częstotliwość
1 100Hz
2 200Hz
3 300Hz
4 400Hz
5 500Hz
6 1000Hz
7 2000Hz
8 3000Hz
9 4000Hz
0 5000Hz
Wybór częstotliwości nie jest przypadkowy
1 został poprzedzony testami na kilkunastu różnych silnikach o różnej mocy i napięciu zasilania.
Po wybraniu interesującej nas częstotliwości wciskamy S2. Wówczas mikrokontroler zapisze dane do wewnętrznej pamięci EEPROM, a na wyświetlaczu wyświetli przez okres isek. literkę H. Powtórne wciskanie S1 i S2 spowoduje zmianę szerokości impulsów wychodzących z tranzystora T4.
Aby nasz układ był bardziej uniwersalny, została dołożona jeszcze jedna opcja, którą wybieramy przy pomocy J1. Jest to wybór wyświetlacza LED. Można go użyć z wspólna anodą lub z wspólną katodą. Jeżeli J1 jest zwarte do +5V. to podczas startu mikrokontroler rozpoznaje, ze w układzie jest LED ze wspólną anoda. Natomiast gdy J1 jest zwarta do masy, mikrokontroler będzie obsługiwał wyświetlacz ze wspólną katodą. Oprócz informacji dostarczanej do mikrokontrolera J1 również dostarcza +5V lub masę do 'wyświetlacza LED. Przy zmianie wyświetlacza musimy pamiętać, aby układ segmentów był identyczny. W przeciwnym razie na wyświetlaczu pojawią się nic nie-znaczące znaki.
Montaż i uruchomienie
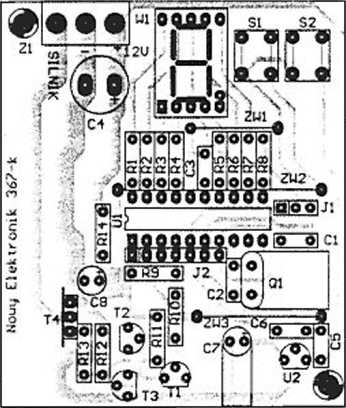
Schemat montażowy został przedstawiony na rys.2 . Jak widać płytka nie zawiera zbyt dużo elementów. Przed rozpoczęciem montażu wskazane jest sprawdzenie płytki drukowanej. Szukamy zwarć lub przerw miedzy ścieżkami. Po sprawdzeniu płytki drukowanej rozpoczynamy montaż. Wlutowujemy wszystkie zwory. Następnie rezystory i kondensatory ceramiczne. Kolejny etap to wlutowanie podstawki pod mikrokontroler i pozostałych elementów oprócz tranzystora T4. Przed wlutowaniem tego tranzystora musimy znać dokładnie parametry silnika, jaki będzie podłączony do sterownika. Gdy będzie to silnik niskonapięciowy, to możemy
włutować IRFZ44. Natomiast, gdy silnik wymaga do pracy wyższego napięcia, to można włutować IRF840. Po wyborze i wlu-towaniu tranzystora, należy go wyposażyć w niewielki radiator. Ostatnie dwie czynności jakie należy wykonać, to usunięcie resztek kalafonii i sprawdzenie poprawności montażu. Resztki kalafonii można usunąć przy pomocy pędzelka i denaturatu, acetonu, spirytusu. Natomiast sprawdzenie poprawności montażu polega na powtórnym sprawdzeniu czy wszystkie elementy są na swoich miejscach oraz czy nie powstały niepotrzebne zwarcia podczas lutowania.
Pierwsze uruchomienie układu polega na przytrzymaniu St i włączeniu zasilania. Oczywiście przedtem wybieramy typ wyświetlacza przy pomocy Jl. Po włączeniu zasilania na wyświetlaczu zapalą się trzy poziome segmenty. Wciskając S1 wybieramy częstotliwość, z jaką będzie pracował sterownik. Zatwierdzenie wybranej częstotliwości dokonujemy przez wciśnięcie S2. Zapis do pamięci układ zasygnalizuje literką H. Po około 1 sekundzie układ jest gotów do pracy. Wciskając S1 lub S2 możemy zwiększać lub zmniejszać szerokość impulsów, a tym samym prędkość obrotową wirnika w naszym silniku.
Podstawowe parametry wybranych tranzystorów MOS FET
|
TYP |
uSD |
'O |
|
IRFZ34 |
55V |
29A |
|
IRFZ44 |
60V |
48A |
|
IRF540 |
100V |
28A |
|
IRF640 |
200V |
18A |
|
IRF740 |
400V |
10A |
|
IRF840 |
500V |
8A |
Rys. 2 Rozmieszczenie elementów na płytce drukowanej (skała 7:7}
Wyszukiwarka
Podobne podstrony:
K 450a Analogowy sterownik silnika prądu stałego (PWM)Nowy Elektronik 450-K Układ umożliwia regulacj
SILNIK PRĄDU STAŁEGO BOCZNIKOWY [1] SILNIK PRĄDU STAŁEGO BOCZNIKOWY Schemat elektryczny Prędkość obr
K 255a Falownik - sterowanie obrotów silników prądu przemiennego Nowy Elektronik 255-K
napędy i sterowanie Rys. 11. Silnik elektryczny szczotkowy prądu stałego 10 kW może pracować jako pr
ELEMENTY SZCZOTKOWEGO SILNIKA PRĄDU STAŁEGO I RUCH OBROTOWY WAŁU TEGO SILNIKA Ruch
ELEMENTY BEZSZCZOTKOWEGO SILNIKA PRĄDU STAŁEGO I RUCH OBROTOWY WAŁU TEGO
5.5 Układy wykonawcze 5.5.1 Mostek H - sterowanie silnikiem prądu stałego Mostek H (ang. H-Bridge) t
Układy sterownia silnika obcowzbudnego prądu stałego z przekształtnikami energoelektronicznymi. W
ScanImage07 Zasada budowy maszyny prądu stałegoRodzaje silników elektrycznych: silniki prądu stałego
schem 1. Model silnika prądu stałego Silnik elektryczny prąciu stałego, którego model pokazano na ry
Silnik prądu stałego M - moment obrotowy B - tarcie lepkie J - bezwładność R,L- rezystancja i
więcej podobnych podstron