M014
11. Dynamiczne Pozycjonowanie Statku
11.1. Definicja manewru dynamicznego pozycjonowania
W każdym wypadku ruchu statku działają na niego różne siły zewnętrzne o zmiennych wielkościach, którym należy przeciwdziałać siłami wytwarzanymi przez napęd główny i urządzenie sterowe (rys. 11.1). Podczas manewrowania statkiem konieczne jest ciągłe uwzględnianie jego zdolności zatrzymywania i przyspieszania, a więc masy kadłuba i mocy napędu, sterowności, a więc reakcji na wychylenie steru, oraz wielkości opóźnień wykonania poleconych manewrów przy stałym obserwowaniu i przewidywaniu reakcji jednostki na działanie wiatru, falowania, prądu, zawirowań wody i ukształtowania akwenu (p. 1.5). W czasie normalnej żeglugi celem tych działań jest utrzymanie statku na założonym kursie z określoną dokładnością. W niektórych rodzajach działalności na morzu konieczna jest jednak daleko większa precyzja, z dopuszczalnym marginesem błędu liczonym w metrach, poruszania się statku po założonej trajektorii bądź też utrzymywania go w ściśle wyznaczonej pozycji.
Określenie dynamiczne pozycjonowanie statku (Dynamie positionning) było zarezerwowane pierwotnie dla manewru utrzymania przez statek lub inny obiekt pływający zadanej lozycji i zadanego kąta kursowego przez zadany czas z żądaną dokładnością. Z czasem w marę rozwoju eksploatacji oceanów i wynikłych stąd nowych zadań, jako manewr dyna-nicznego pozycjonowania obiektu pływającego zaczęto przyjmować każdy manewr wymagający utrzymania z żądaną precyzją trajektorii względem dna, często połączony z dodatkowym wymogiem utrzymania zadanej minimalnej stałej prędkości. Te nowe zadania wiązały
wiatr
prąd
przesunięcie
wzdłużne
falowanie

Rys. 11.1. Czynniki zewnętrzne działające na statek oraz reakcja statku na ich działanie
się oczywiście z koniecznością zaprojektowania i budowy nowym —...... .
skutecznych w dużym zakresie prędkości statku i posiadających możliwość zmiany kierunku siły sterującej w zakresie 0-360°.
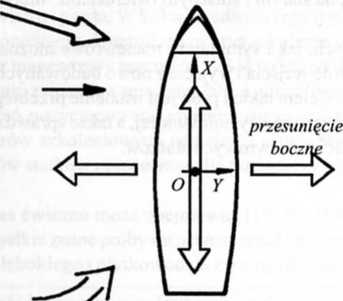
Takie wymagania zmuszają do stosowania specjalnych, niekiedy dublowanych, precyzyjnych urządzeń nawigacyjnych i urządzeń napędowo-manewrowych zintegrowanych w jeden system. Rozwiązanie to pozwala na daleko idącą automatyzacją procesu kierowania statkiem (rys. 11.2).
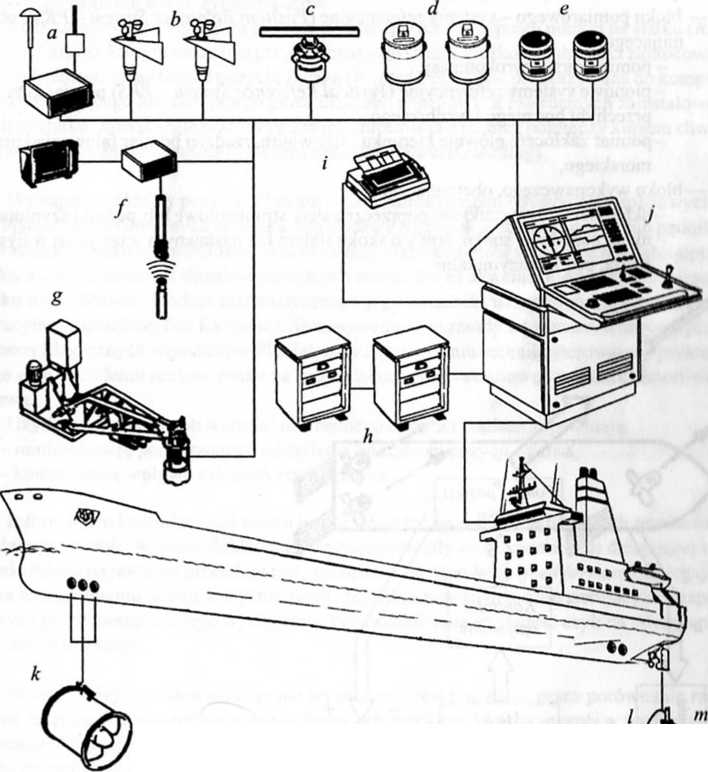
Rys. 11.2. Składowe systemu pozycjonowania dynamicznego: a/ DGPS, b/ wiatromierz, c/ antena systemu referencyjnego Artemis, d/ czujniki odchylenia od pionu, e/ żyro kom pasy, fl System hydroakustyczny HPRS, g/czujnik systemu mechanicznego "tautwire", h/ zasilanie awaryjne systemu, i/ drukarka, j/ konsola operatora, k/stery strumieniowe (pędniki kolumnowe, pędniki azymutalne), 1/śruby napędowe, m!stery główne.

Wyszukiwarka
Podobne podstrony:
M018 Punkt zwrotu 1. Rys. 11.8. System pozycjonowania dynamicznego w reżimie „ automatycznego śledze
img069 WIL gr. 7, 8,9 r. ak. 2010/11 Dynamika - przykłady zadań Ruch pod wpływem stałej siły 1.
5.11.3. Dynamika ocen w latach
DSC00267 (11) Dynamika rozwoju ogniw łańcucha GŻWarunkiem harmonijnego rozwoju gospodarki żywnościow
nuklearna1 11. Dynamiczna scyntygrafia dróg żółciowych za pomocą HEPIDA służy do: oceny patologii dr
img069 3 WIL gr. 7, 8,9 r. ak. 2010/11 Dynamika -przykłady zadań Ruch pod wpływem stałej siły 1
45892 str 077 Tablica 11.9 cd. Rys. 11.6. Dynamiczne ugięcie wału 77
IMG20101202�3 Rysunek 11.1. Grafkzna prezentacja odmiennych definicji holdingu SpOtu dominująca A) H
Sieci komputerowe .11 A i B - procedury działania, terminologia i definicje; D i E - taryfy; F - usł
skanuj0005 (79) — 11 — ZARYS WIEDZY O TURYSTYCE Definicja ta została zmodyfikowana po drugiej wojnie
w węzłach sieciach logistycznych. 11 Opakowania w systemach logistycznych Definicja
więcej podobnych podstron