0000018
G A
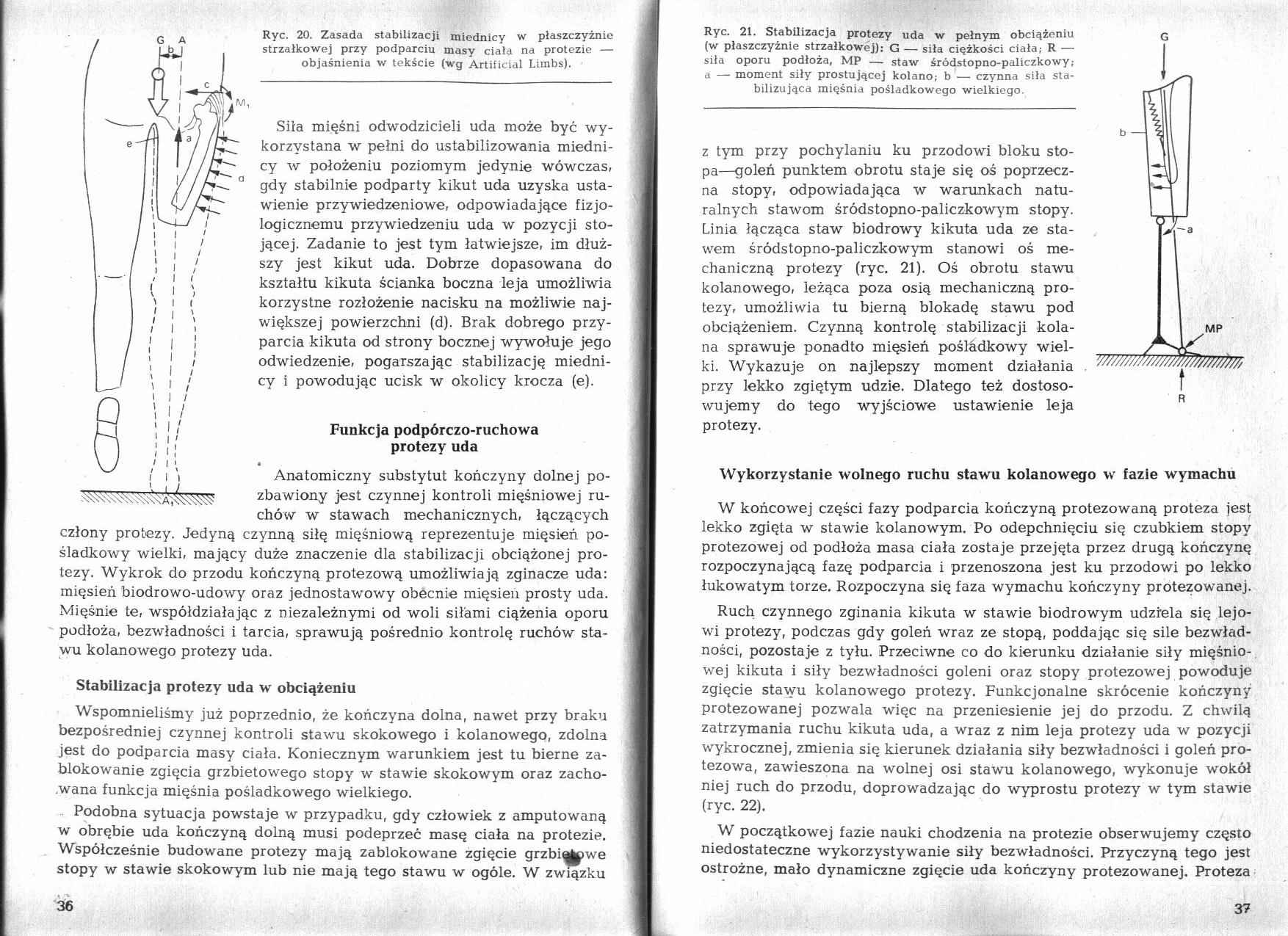
Ryc. 20. Zasada stabilizacji miednicy w płaszczyźnie strzałkowej przy podparciu masy ciała na protezie — objaśnienia w tekście (wg Artiiicial Litnbs).
Siła mięśni odwodzicieli uda może być wykorzystana w pełni do ustabilizowania miednicy w położeniu poziomym jedynie wówczas, gdy stabilnie podparty kikut uda uzyska ustawienie przywiedzeniowe, odpowiadające fizjologicznemu przywiedzeniu uda w pozycji stojącej. Zadanie to jest tym łatwiejsze, im dłuższy jest kikut uda. Dobrze dopasowana do kształtu kikuta ścianka boczna leja umożliwia korzystne rozłożenie nacisku na możliwie największej powierzchni (d). Brak dobrego przyparcia kikuta od strony bocznej -wywołuje jego odwiedzenie, pogarszając stabilizację miednicy i powodując ucisk w okolicy krocza (e).
Funkcja podpórczo-ruchowa protezy uda
Anatomiczny substytut kończyny dolnej po-zbawiony jest czynnej kontroli mięśniowej ruchów w stawach mechanicznych, łączących człony protezy. Jedyną czynną siłę mięśniową reprezentuje mięsień po-śladko-wy wielki, mający duże znaczenie dla stabilizacji obciążonej protezy. Wykrok do przodu kończyną protezową umożliwiają zginacze uda: mięsień biodrowo-udowy oraz jednostawowy obecnie mięsień prosty uda. Mięśnie te, współdziałając z niezależnymi od woli siłami ciążenia oporu podłoża, bezwładności i tarcia, sprawują pośrednio kontrolę ruchów stawni kolanowego protezy uda.
Stabilizacja protezy uda w obciążeniu
Wspomnieliśmy już poprzednio, że kończyna dolna, nawet przy braku bezpośredniej czynnej kontroli stawu skokowego i kolanowego, zdolna jest do podparcia masy ciała. Koniecznym warunkiem jest tu bierne zablokowanie zgięcia grzbietowego stopy w stawie skokowym oraz zachowana funkcja mięśnia pośladkowego wielkiego.
Podobna sytuacja powstaje w przypadku, gdy człowiek z amputowaną w obrębie uda kończyną dolną musi podeprzeć masę ciała na protezie. Współcześnie budowane protezy mają zablokowane zgięcie grzbi^>we stopy w stawie skokowym lub nie mają tego stawu w ogóle. W związku
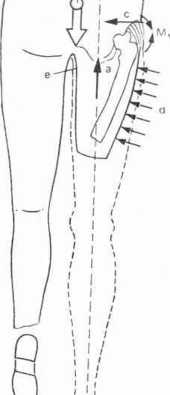
Ryc. 21. Stabilizacja protezy uda w pełnym obciążeniu (w płaszczyźnie strzałkowej): G — siła ciężkości ciała,- R — siła oporu podłoża, MP — staw śródstopno-paliczkowy; a — moment siły prostującej kolano; b — czynna siła stabilizująca mięśnia pośladkowego wielkiego.
G
z tym przy pochylaniu ku przodowi bloku stopa—goleń punktem obrotu staje się oś poprzeczna stopy, odpowiadająca w warunkach naturalnych stawom śródstopno-paliczkowym stopy.
Linia łącząca staw biodrowy kikuta uda ze stawem śródstopno-paliczkowym stanowi oś mechaniczną protezy (ryc. 21). Oś obrotu stawu kolanowego, leżąca poza osią mechaniczną protezy, umożliwia tu bierną blokadę stawu pod obciążeniem. Czynną kontrolę stabilizacji kolana sprawuje ponadto mięsień pośladkowy wielki. Wykazuje on najlepszy moment działania przy lekko zgiętym udzie. Dlatego też dostosowujemy do tego wyjściowe ustawienie leja protezy.
Wykorzystanie wolnego ruchu stawu kolanowego w fazie wymachu
W końcowej części fazy podparcia kończyną protezowaną proteza jest lekko zgięta w stawie kolanowym. Po odepchnięciu się czubkiem stopy protezowej od podłoża masa ciała zostaje przejęta przez drugą kończynę rozpoczynającą fazę podparcia i przenoszona jest ku przodowi po lekko łukowatym torze. Rozpoczyna się faza wymachu kończyny protezowanej.
Ruch czynnego zginania kikuta w stawie biodrowym udziela się lejowi protezy, podczas gdy goleń wraz ze stopą, poddając się sile bezwładności, pozostaje z tyłu. Przeciwne co do kierunku działanie siły mięśniowej kikuta i siły bezwładności goleni oraz stopy protezowej powoduje zgięcie stawu kolanowego protezy. Funkcjonalne skrócenie kończyny protezowanej pozwala więc na przeniesienie jej do przodu. Z chwilą zatrzymania ruchu kikuta uda, a wraz z nim leja protezy uda w pozycji wykrocznej, zmienia się kierunek działania siły bezwładności i goleń pro-tezowa, zawieszona na wolnej osi stawu kolanowego, wykonuje wokół niej ruch do przodu, doprowadzając do wyprostu protezy w tym stawie (ryc. 22).
W początkowej fazie nauki chodzenia na protezie obserwujemy często niedostateczne wykorzystywanie siły bezwładności. Przyczyną tego jest ostrożne, mało dynamiczne zgięcie uda kończyny protezowanej. Proteza
37
Wyszukiwarka
Podobne podstrony:
Wymię krowy Ryc. 129. Przekrój wymienia krowy w płaszczyźnie strzałkowej 1 - przewód brodawkowy; 2 -
100?32 Ruchomość miednicy "W płaszczyźnie strzałkowe] Na głowach kości udowych Uzależniona od
DSC01463 (3) Stabilizacja kręgosłupa w płaszczyźnie strzałkowej. Gorset szkieletowy zapewnia dobra s
12. Wymachy nóg w tył (w płaszczyźnie strzałkowej) Wymachy należy wykonywań swobodnie, na początku w
ontogeneza (4) przenoszenia ciężaru ciała w płaszczyźnie strzałkowej ( przód - tył ) dynamicznej sta
DSC01480 (2) Korekcja kręgosłupa w płaszczyźnie strzałko Zasadą działania korekcyjnego we wszystkich
skanuj0045 (17) .5. Charakterystyka współczesnego ruchu turystycznego na świecie 195 min osób Ryc. 2
więcej podobnych podstron