0000021
waniem leja, a także nieprawidłowym ustawieniem osi stawu kolanowego w płaszczyźnie poziomej.
5. Powłóczenie stopą protezy w fazie wymachu. Jest to zjawisko dość częste u osób zaczynających, chodzić na pierwszej swej protezie. Przyczyna tego tkwi w mało energicznym, zbyt wolnym przenoszeniu masy ciała nad podpierającą ją zdrową kończyną i mało energicznym wyrzucie kikuta wraz z protezą ku przodowi. Zjawisku temu towarzyszy wolny ruch prostowania stawu kolanowego protezy oraz często niepełny wyprost w chwili dotknięcia pięty podłoża. Przyczyną tego zjawiska może być również ograniczenie swobody ruchów osi stawu kolanowego protezy (zbyt silne skręcenie osi, korozja). Przyczyną powłóczenia stopą pro-tezową może być również funkcjonalne wydłużenie kończyny protezo-wanej na skutek przykurczu przywodzicieli uda po stronie zdrowej, lub też zsuwanie się protezy z kikuta (zbyt obszerny lej, niedostateczne zawieszenie, wadliwe założenie protezy).
6. Obwodzenie kończyną protezowaną w fazie wykroku, czyli przenoszenie protezy ku przodowi nie po linii prostej, lecz po łuku wypukłym na zewnątrz. Może ono być spowodowane nadmierną długością protezy lub niewykorzystaniem zgięcia w stawie kolanowym protezy, z przyczyn mechanicznych lub funkcjonalnych (patrz punkt 5). Towarzyszy temu unoszenie się na palcach kończyny zdrowej. Taki sposób chodzenia może być też nawykiem, szczególnie u osób, które nosiły protezy starego typu (z bezpiecznym ustawieniem protezy w przeproście kolana lub z zamkiem iglicowym w tym stawie).
7. Nierównomierny wymach rąk oraz nierównomierny wykrok obserwujemy w przypadku zaburzeń stabilizacji, spowodowanych bolesnością kikuta, niewygodą w leju protezy, zbyt luźnym lejem protezy, wadliwym ustawieniem protezy itp.
Zaopatrzenie protezowe w przypadku całkowitej amputacji kończyny
Całkowitą amputacją kończyny nazywamy stan, w którym nie można uformować kikuta. Dotyczy to więc amputacji przezkrętarzowej uda lub amputacji kończyny w stawie biodrowym. Zupełny brak kikuta utrudnia umocowanie protezy i stwarza większe wymogi dla mechanizmów ruchowych protezy, kontrolujących działanie jej elementów składowych.
Do niedawna dla pacjentów takich nie wykonywano protez w ogóle lub zaopatrywano w protezy z zamkiem w stawie biodrowym i kolanowym. Umożliwiało to uzyskanie stabilizacji protezy podczas obciążenia, a po otwarciu zamków umożliwiało siadanie. Chód w tej protezie był niewygodny, energochłonny i powodował przeciążanie zdrowego stawu biodrowego.
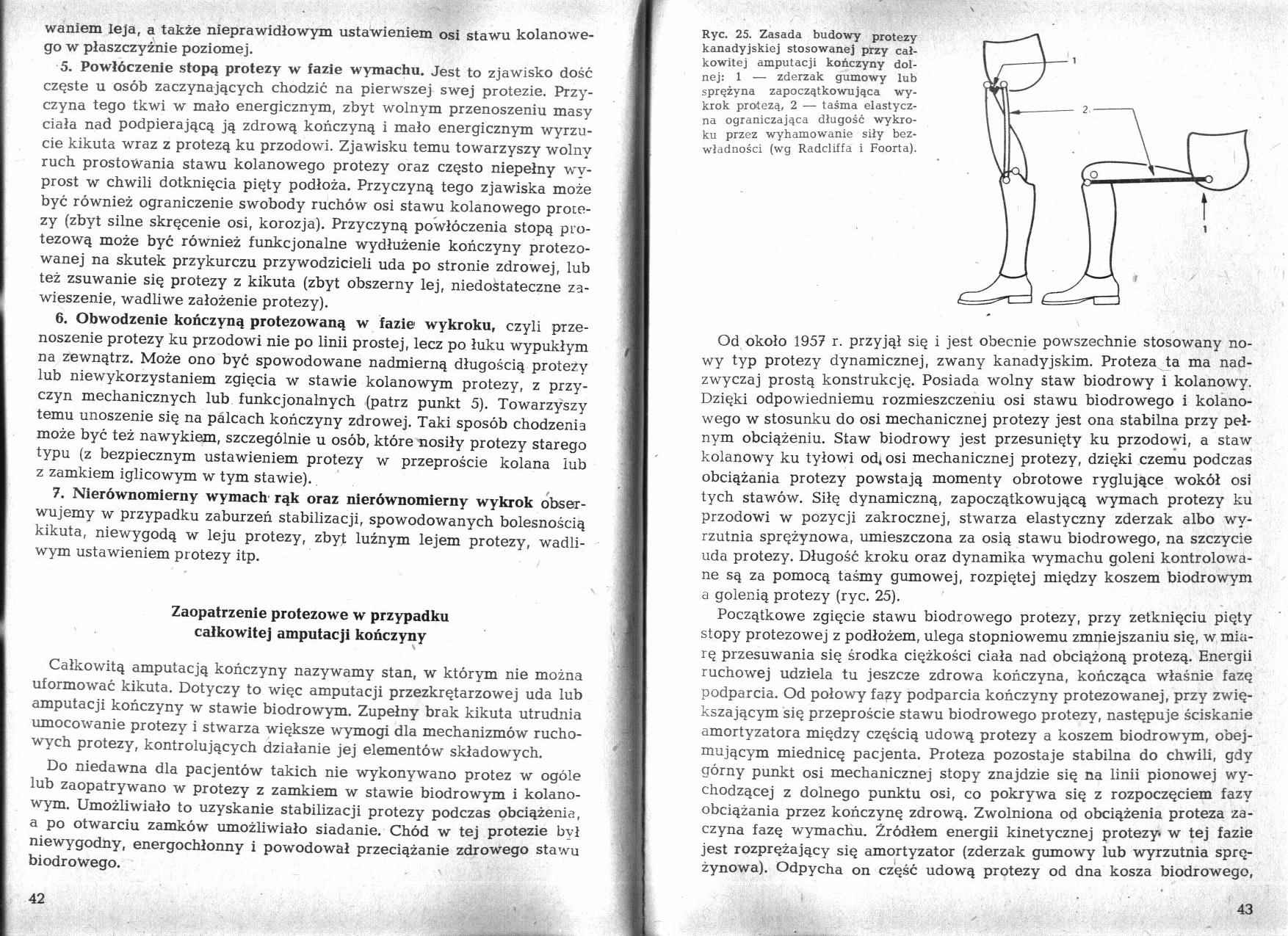
Ryc. 25. Zasada budowy protezy kanadyjskiej stosowanej przy całkowitej amputacji kończyny dolnej: 1 — zderzak gumowy lub sprężyna zapoczątkowująca wy-krok protezą, 2 — taśma elastyczna ograniczająca długość wykro-ku przez wyhamowanie siły bezwładności (wg Radcliffa i Foorta).
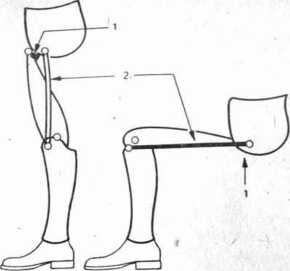
Od około 1957 r. przyjął sią i jest obecnie powszechnie stosowany nowy typ protezy dynamicznej, zwany kanadyjskim. Proteza ta ma nadzwyczaj prostą konstrukcję. Posiada wolny staw biodrowy i kolanowy. Dzięki odpowiedniemu rozmieszczeniu osi stawu biodrowego i kolanowego w stosunku do osi mechanicznej protezy jest ona stabilna przy pełnym obciążeniu. Staw biodrowy jest przesunięty ku przodowi, a staw kolanowy ku tyłowi odt osi mechanicznej protezy, dzięki czemu podczas obciążania protezy powstają momenty obrotowe ryglujące wokół osi tych stawów. Siłę dynamiczną, zapoczątkowującą wymach protezy ku przodowi w pozycji zakrocznej, stwarza elastyczny zderzak albo wyrzutnia sprężynowa, umieszczona za osią stawu biodrowego, na szczycie uda protezy. Długość kroku oraz dynamika wymachu goleni kontrolowane są za pomocą taśmy gumowej, rozpiętej między koszem biodrowym a golenią protezy (ryc. 25).
Początkowe zgięcie stawu biodrowego protezy, przy zetknięciu pięty stopy protezowej z podłożem, ulega stopniowemu zmniejszaniu się, w miarę przesuwania się środka ciężkości ciała nad obciążoną protezą. Energii ruchowej udziela tu jeszcze zdrowa kończyna, kończąca właśnie fazę podparcia. Od połowy fa?y podparcia kończyny protezowanej, przy zwiększającym się przeproście stawu biodrowego protezy, następuje ściskanie amortyzatora między częścią udową protezy a koszem biodrowym, obejmującym miednicę pacjenta. Proteza pozostaje stabilna do chwili, gdy górny punkt osi mechanicznej stopy znajdzie się na linii pionowej wychodzącej z dolnego punktu osi, co pokrywa się z rozpoczęciem fazy obciążania przez kończynę zdrową. Zwolniona od obciążenia proteza zaczyna fazę wymachu. Źródłem energii kinetycznej protezy w tej fazie jest rozprężający się amortyzator (zderzak gumowy lub wyrzutnia sprężynowa). Odpycha on część udową protezy od dna kosza biodrowego,
43
Wyszukiwarka
Podobne podstrony:
P1010633 AKTYWACJA GŁOWY PRZYŚRODKOWEJ M. CZWOROGŁOWEGO UDA W USTAWIENIU KĄTOWYM STAWU KOLANOWEGO Z
P1010633 AKTYWACJA GŁOWY PRZYŚRODKOWEJ M. CZWOROGŁOWEGO UDA W USTAWIENIU KĄTOWYM STAWU KOLANOWEGO Z
85490 P1010633 AKTYWACJA GŁOWY PRZYŚRODKOWEJ M. CZWOROGŁOWEGO UDA W USTAWIENIU KĄTOWYM STAWU KOLANOW
55854 Slajd6 (42) Politechnika WrocławskaELEMENTY TRASY DROGOWEJ W PLANIE Rzut osi drogi na płaszczy
skanuj0009 2 Ryc. 79. Mechanika stawu kolanowego (Sobotta) Opisz rycinę. 2. Jakie ruchy i wokół jaki
mieszczenie osi stawu biodrowego i kolanowego), zbyt sztywny klin piętowy stopy protezowej, brak peł
Zdjęcie0067 Obciążenia stawu kolanowego ODoazente os-owe podeZ3S chodzeń, a w po*. lać po schodach j
Zdjęcie0072 Obciążenia stawu kolanowego j Kolano prawidłowo obciążone w staniu ma równomierny rozkła
Zdjęcie0080 Uszkodzenia stawu kolanowe Uszkodzenie więzadte pobocznego dSdSS^SSiPobocznychSrS S5S35O
Zdjęcie0085 Uszkodzenia stawu kolanowegoUizioózoma chrząstki su*owej n** Miz<r*x «or«o.»
Zdjęcie0094 Mloplastyka stawu kolanowego ^korzystanie endoprotez w zaieznosci od stopnia rozwoju zmi
0000001 17 rvc. 22. Ćwiczenia ręki w opatrunku gipsowym. Rvc. 23. Ćwiczenia stawu kolanowego po wyci
0000001 18 Ryc. 25. Ćwiczenie samowspomagane stawu kolanowe. go. Ryc. 26. Ćwiczenie rozciągające sta
0000001 21 Ryc. 35. Ćwiczenie czynne wolne stawu kolanowego po złamaniu dalszej połowy podudzia. Ryc
reh test (12) 37)W przypadku urazu stawu kolanowego najbardziej dochodzi do zaniku? a)
więcej podobnych podstron