1510476x8670827811146Q3838422 n
Wyznaczanie pracy urn tpruwnoki modelu dźwigni
szkieletowi) • mięśniowych.
I. llmloMn mmlrlii
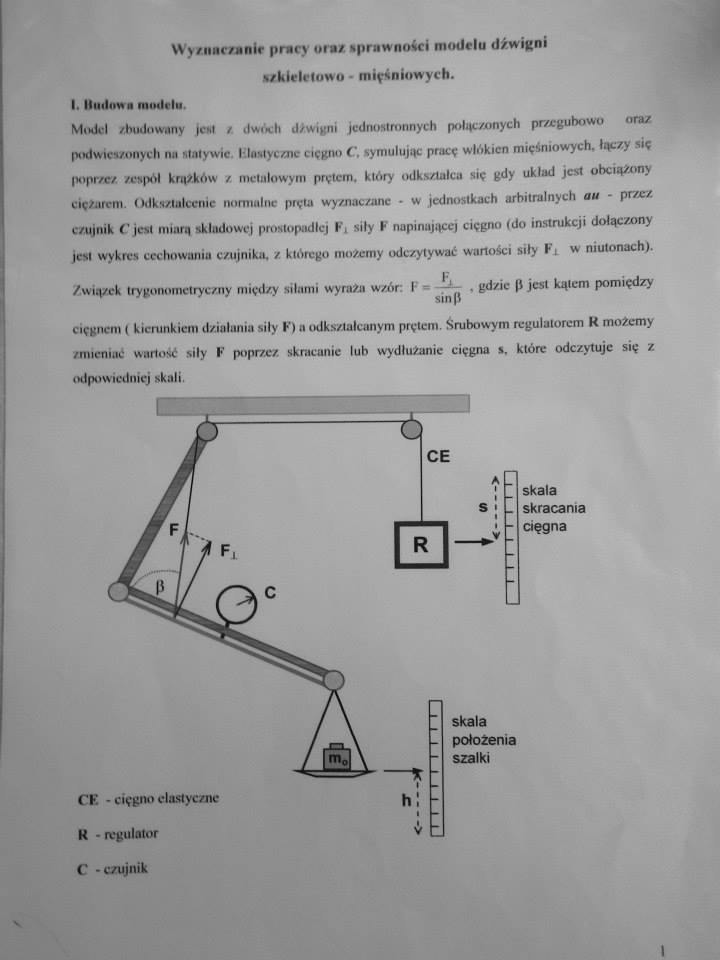
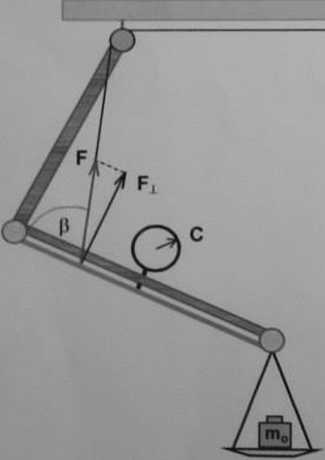
Model zbudowany jest z dwóch dźwigni jednostronnych poleczonych przegubowo oraz podwieszonych nu statywie I lostycznc cięgno C symulując pracę włókien mięśniowych, leczy się poprzez zespól krążków / mclulowym prętem, który odkształca się gdy układ jest obciążony ciężarem. Odkształcenie nomuilnc pręta wyznaczane • w jednostkach arbitralnych au - prze/. czujnik (' jest miarą skludowci prostopadłej F, siły F nopinająccj cięgno (do instrukcji dołączony jest wykres cechowania czujnika, z którego możemy odczytywać wartości siły Fi w niutonach).
p
/.wiązek trygoiionietryc/nv między siłami wyraZa wzór: I : . gdzie |J jest kątem pomiędzy
sin (i
cięgnem ( kierunkiem działania siły F) a odkształcanym prętem. Śrubowym regulatorem K moZemy zmieniać wartość siły I*’ poprzez skracanie lub wydłużanie cięgna s. które odczytuje się z odpowiedniej skali.
skala
skracania
cięgna
skala
położenia
szalki
CE - cięgno elastyczne K - regulator C -czujnik
Wyszukiwarka
Podobne podstrony:
WP 140328�4 Wyznaczanie pracy oraz sprawności modelu dźwigni szkieletowo - mięśniowych. I. Budowa mo
Przed rozpoczęciem pracy. Sprawdź numer modelu umieszczony na pokrywie skanera. Poniższe instrukcje
S6301922 9 Ćwiczenie nr 25 WYZNACZANIE OGNISKOWEJ I PROMIENIA KRZYWIZNY MODELU SOCZEWKI OKAWyiMoaoe
CCF20090908�004 (2) 2009-06-13cd. Orientacja produkcyjna. Cechy charakterystyczne organizacji pracy
9 (1198) 38.Opisz w wykorzystanie rysunku metodę wyznaczania OSC człowieka przy pomocy dźwigni
9 (1202) 38.0pisz w wykorzystanie rysunku metodę wyznaczania OSC człowieka przy pomocy dźwigni
Projektowanie logiczne - przegląd Wyznacz relacje dla logicznego modelu danych Wykonaj normalizację
Projektowanie logiczne (krok 1) Wyznacz relacje dla logicznego modelu danych Relacje będziemy opisyw
CuBR^: Poniżej wymagane ogólne zakresy pracy: 1. Opracowanie numerycznego modelu
fiz (24) 27. WYZNACZANIE PRACY WYJŚCIA ELEKTRONÓW Z METALI W BADANIACH EMISJI TERMOELEKTRONOWEJ Prac
P1000652 (2) 38 Opisz z wykorzystaniem rysunku metodę wyznaczania OSC człowieka przy pomoo dźwigni j
Wyposażenie stanowiska pracy: - instrumentarium chirurgiczne: kleszcze, dźwignie i
więcej podobnych podstron