151
Obliczanie śrub łączących reduktor z ramą wykonuje się przy opracowaniu złożeniowego rysunku reduktora.
Obliczenie polega na wyznaczeniu śruby złącza śrubowe go o największym obciążeniu i określeniu jej średnicy.
Dla wyznaczenia śruby o największym obciążeniu należy:
1) wszystkie zewnętrzne siły i momenty obciążające reduk tor doprowadzić do środka złącza śrubowego (SZŚ),
2) zgrupować zewnętrzne momenty i siły działające w oddzielnych płaszczyznach i kierunkach,
3) z każdej grupy zewnętrznych momentów i sił wyznaczyć siły w poszczególnych śrubach złącza śrubowego,
4) obliczyć sumaryczne siły obciążające poszczególne śru by złącza śrubowego i wyznaczyć śrubę o największym obciążeniu,
5) obliczyć średnicę tej śruby,
6) określić średnicę om om w korpusie reduktora potrzebną dla zamontowania śruby o średnicy rówmej (większej) obliczonej lub porównać obliczoną średnicę śruby z przyjętą w czasie projektowania.
Przy wyznaczeniu sił w poszczególnych śrubach złącza występują 4 schematy obliczeniowe (rys. 1.5.13.10):
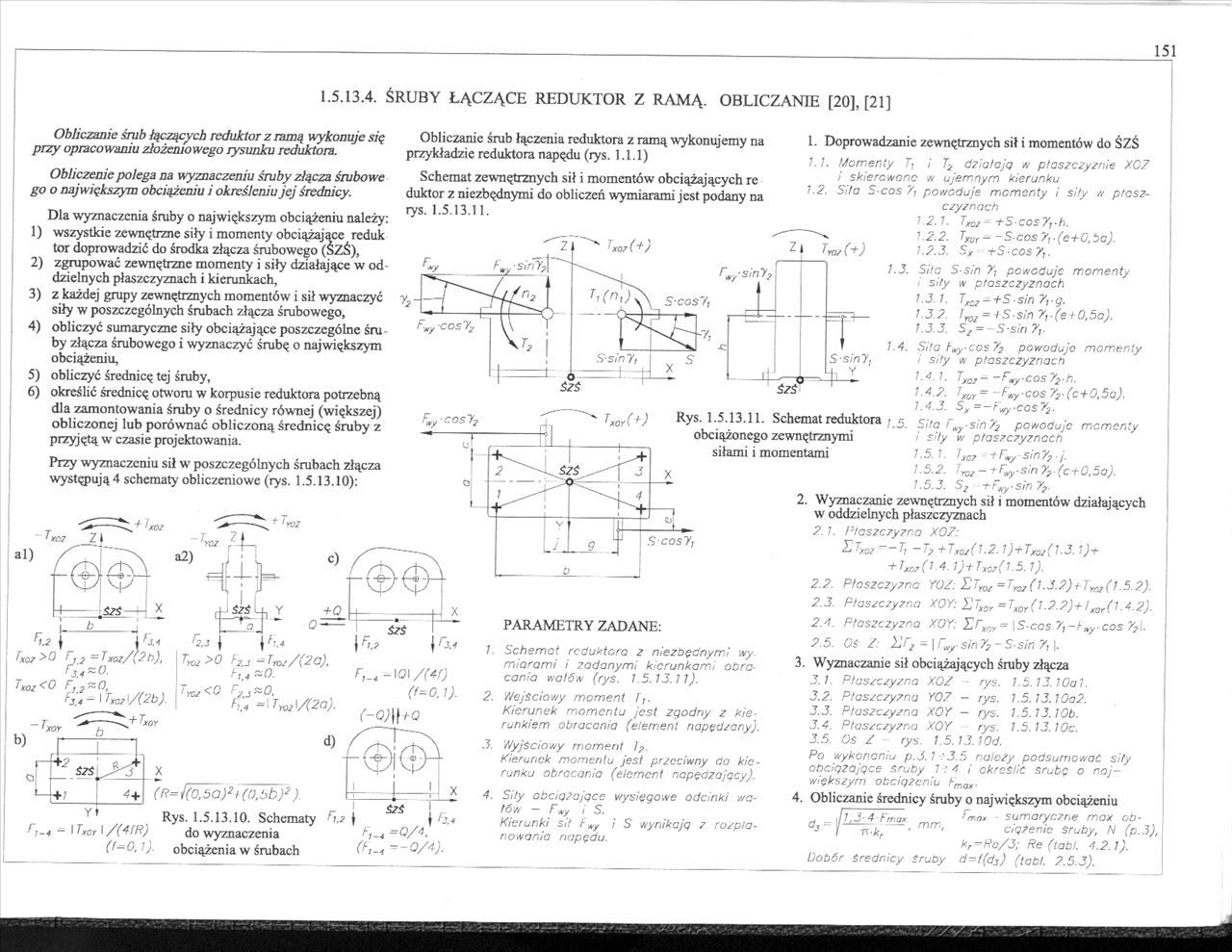
Obliczanie śrub łączenia reduktora z ramą wykonujemy na przykładzie reduktora napędu (rys. 1.1.1)
Schemat zewnętrznych sił i momentów obciążających rc duktor z niezbędnymi do obliczeń wymiarami jest podany na rys. 1.5.13.11.
|
"S i |
*y 1 v |
|
Fm/ cos Yp |
V, I |
|
Fmycos7? * |
- |

r
|
• / |
YOZ \ "r/ | ||
|
wy-sin7p | |||
|
il |
T Ssin7, 4i Y | ||
|
ŚZŚ |
j -—p—— | ||
'*0!
YOZ
al)
|
'W fm fi -1- |
■YCZ Y H—. a2) |
c) |
/ / 1 / A 1 | |||
|
tp | tŚZŚ—'A X |
^ T H-i śzś l |
r ■h Y |
■bO |
r -ęr*r r |
j | |
|
i b * |
jo. |
G.J |
- h.4 |
0-— |
ŚZŚ |
r |
Tro2 >0 f2.3 — Traz/(2O),
t.4
' YCZ F0 r 2.3*0,
r,4 =\r
Tx0y(+) Rys. 1.5.13.11. Schemat reduktora / 5 obciążonego zewnętrznymi siłami i momentami
1. Doprowadzanie zewnętrznych sił i momentów do ŚZŚ
1.1. Momenty T> i T-x działają w płaszczyźnie XC7 i skierowane w ujemnym kierunku
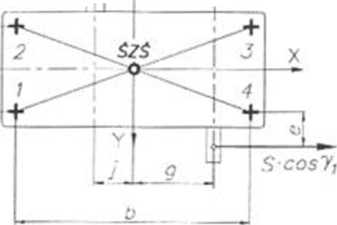
1.2. Sila S-cos /'i powoduje momenty i sity w płasz
czyzn ach
’.2.1. 7*0/ ~ -i-S-cos7t‘h.
1.2.2. Txor--S:ćos7r(c+0,bo).
1.2.3. 5* -rS-co$7i.
1.3. Sita S-sin 7: powoduje momenty i siły w płaszczyznach 1.3 1. TxC7-+S sin 7rę.
1 3 2. 1Y0/ = / S • sin 7) - (e t- 0.5o).
1.3.3. S/ =-S sin 7,.
1.4. Sita lwy-cos 72 powoduje momenty i sity w ptaszczyznacn
1.4.1. T„,--F„y.cos72.h.
1.4.2. fX0Y = -frwy cos72 (c+0.5o).
1.4.3. Sx=-Fwyccs72.
Siła >~My• sin 72 powoduje momenty i siły w płaszczyznach
1.5.1. 7,
1.5.2.
fu .
!’xoz ~ Txoz/(2 n),
114*0.
Txoz<o r, 2no,
^3.4 ~ 1 Txc?\/(2b).
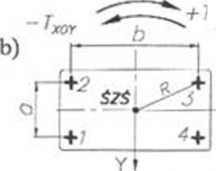
XQY
r,_4 - \Txor\/(4fH)
o-o. 1)

r,_4 -\o\/(4f) (f=o. 1).
(-Q)\\hQ

śzś
(R= f(0,5Q)21 (O.bb)2)
Rys. 1.5.13.10. Schematy rr.z | | h.-
do wyznaczenia rt-* =0/4.
obciążenia w śrubach Oi-4~ 0/4).
PARAMETRY ZADANE:
7. Schemat reduktora z niezbędnymi wy miarami i zadanymi kierunkami obrc eonie wołów (rys. 1.5.13.11).
2. /Zejściowy moment I,.
Kierunek momentu jest zgodny z kierunkiem obracania (element napędzany).
3. Wyjściowy moment lp
Kierunek momentu jest przeciwny do kierunku obracania (element napędzający).
4. Sity cbciaZajęcc wysięgowe odcinki wałów F ■,Ą/y I S.
Kierunki sit i „y i S wynikają z rozplanowania napędu.
xc? + ł~#y sin 7p ■ j.
Tyot - rF^y-sin 7p (c-t0.5o).
1.5.3. S2 t FAy • sin 7p.
2. Wyznaczanie zewnętrznych sił i momentów' działających w oddzielnych płaszczyznach
2.1. Ptaszczyzna X07:
£• ~xoz ““ Tj ” :z + W 1 2.1) t 7*0/ (1.3.1)+
4- 1Xo?(14. 1ji Txoz( 13.1).
2.2. Płaszczyzno YOZ: £ Tw=Tm(1.3.2) + 7 w (1.5.2). 2.3 Płaszczyzna XOY: £7xar =Tx0r(1.2.2)+1x0r(1.4.2).
2.4. Płaszczyzna XOY: £rxor = \ S-cos 7-, -A„y■ cos 72\.
2.5. Oś Z li r2 - | rMy. sin7p - S • sin 7, |.
3. Wyznaczanie sił obciążających śruby złącza
3.1. Płaszczyzna XOZ rys. 1.5.13.10a1.
3.2. Płaszczyzno Y07 - rys. 1.5.13.10o2.
3.3. Płaszczyzna XOY - rys. 1.5.13.10b.
3.4. Płaszczyzna XOY rys. 1.5. 13. We.
3.5. Oś Z - rys. 1.5.13.10d.
Po wykonaniu p.3.1 : 3.5 należy podsumować siły obcigzajgce śruby 1:4 i określić śrubę o największym obciążeniu Ffr,ox.
4. Obliczanie średnicy śruby o największym obciążeniu
Jl,3-4 F/nox ~rr.o* sumaryczne mox ob*
7 ) ń.kr ' mrr‘‘ ciążenie Śruby, N (p.3),
kr-Rc/3; Re (tabl. 4.2.1). Dobór Średnicy śruby d-1(d3) (tabl. 2.5.3).
Wyszukiwarka
Podobne podstrony:
151 2 151.5.13.4. ŚRUBY ŁĄCZĄCE REDUKTOR Z RAMĄ. OBLICZANIE [20], [21] Obliczanie śrub łączących red
1511.5.13.4. ŚRUBY ŁĄCZĄCE REDUKTOR Z RAMĄ. OBLICZANIE [20], [21] 4) F,;<
kurmaz151 1511.5.13.4. ŚRUBY ŁĄCZĄCE REDUKTOR Z RAMĄ. OBLICZANIE [20], [21] Obliczanie śrub łączącyc
87 87 Ynleius y expeiimentnles Yoleursy piedites1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 1" 18
skanowanie0003 Spis treści • 03 05-11 11 -13 13-14 15-18 18-19 20-21 22-25 26 URSA GLASSWOOL*Wymagan
3 H10, 11 12 13 14 15 16, 17’•! 19, 20. 21, <2. 23. 24 J 23 J
6 9 10* 12 13 1415 16 17 18 19 20** 21 22 23 24 25** 26 27 28 29 30GR 3 ds.
CM O 21 22 23 24 25 26 29 30 31Lipiec Pn Wt Śr Cz Pt Sb 1 2 4 5 6 7 8 9 11 12 13 14 15 16 18 19
CCF20110119�024 GODZINA DZIEŃ MIESIĄC TIME DAY MONTH b 7 8 =1 10 11 12 13 14 15 Ib 17 16 1*1 20 21 2
CCF20110119�026 GODZINA DZIEŃ HIESIĄC TIME b 7 8 T 10 11 12 13 14 15 Ib 17 18 1*1 20 21 22 DAY 1 2 3
CCF20110119�034 GODZINA DZIEŃ MIESIĄC TIME DAY MONTH b 7 A 1 10 11 12 13 14 1S Ib 17 lfl M 20 21 22
CCF20110119�038 GODZINA DZIEŃ MIESIĄC TIME DAY MONTH t 7 fi 1 10 11 12 13 14 15 Ib 17 Ifi M 20 21 22
Ol 1 2 3 4 5 67 8 9 10 1112 13 14 15 1617 18 19 20 21 22 23 24 25 26 27 28 29 30 31 1 2 3 4 5 6 7 8
kalendarz3(2) Styczeń l 2 3 4 5 6 7 8 9 10 11 12 13 14 1? 16 17 18 19 20 21 22 23 24 25 26 27 28 29
kalendarz(2) Styczeń Pn Wt Sr Cz Pt S N 2 3 4 7 8 9 10 11 1 13 14 15 16 17 18 1 20 21 22 23 24
więcej podobnych podstron