kurmaz151
Obliczanie śrub łączących reduktor z ramą wykonu je się przy opracowaniu złożeniowego rysunku reduktora.
Obliczenie polega na wyznaczeniu śruby złącza śrubowe go o największym obciążeniu i określeniu jej średnicy.
Dla •wyznaczenia śruby o największym obciążeniu należy:
1) wszystkie zewnętrzne siły i momenty obciążające reduk-tor doprowadzić do środka złącza śrubowego (SZŚ),
2) zgrupować zewnętrzne momenty i siły działające w oddzielnych płaszczyznach i kierunkach,
3) z każdej grapy zewnętrznych momentów i sił wyznaczyć siły w poszczególnych śrubach złącza śrubowego,
4) obliczyć sumaryczne siły obciążające poszczególne śru by złącza śrubowego i wyznaczyć śrubę o największym obciążeniu,
5) obliczyć średnicę tej śruby,
6) określić średnicę otworu w korpusie reduktora potrzebną dla zamontowania śruby o średnicy równej (większej) obliczonej lub porównać obliczoną średnicę śruby z przyjętą w czasie projektowania.
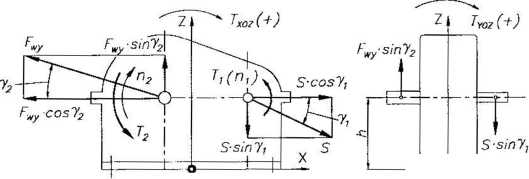
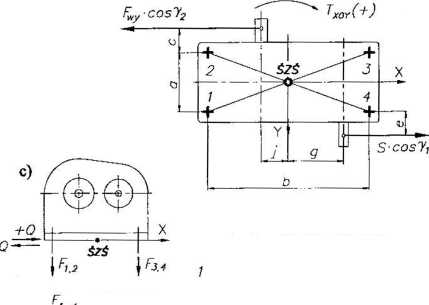
Przy wyznaczeniu sił w poszczególnych śrubach złącza występują 4 schematy obliczeniowe (rys. 1.5.13.10):
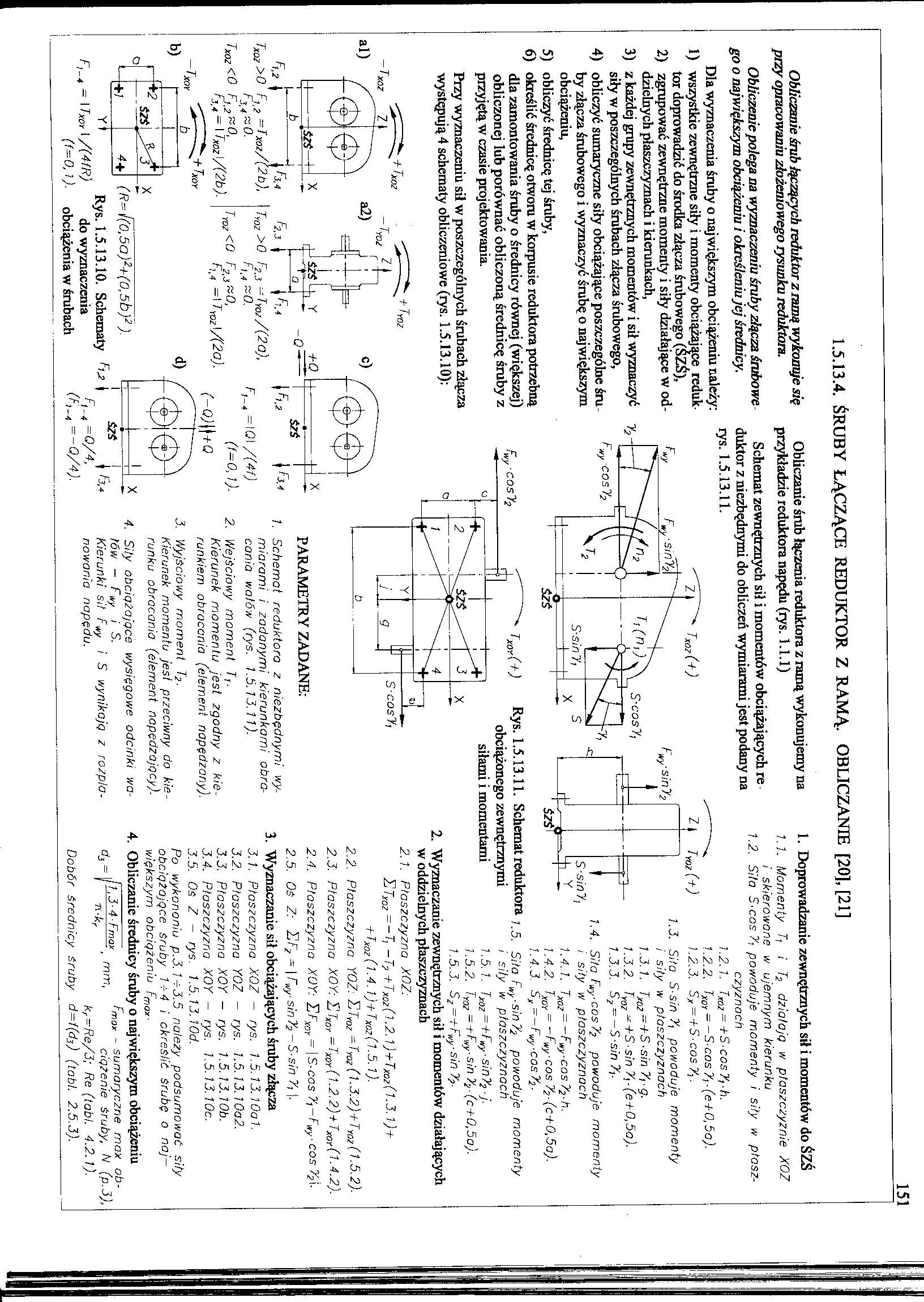
Obliczanie śrub łączenia reduktora z ramą wykonujemy na przykładzie reduktora napędu (rys. 1.1.1)
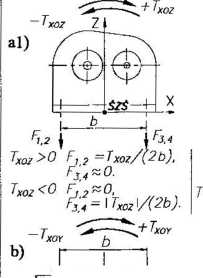
Schemat zewnętrznych sił i momentów obciążających re duktor z niezbędnymi do obliczeń wymiarami jest podany na rys. 1.5.13.11.
śzś
1. Doprowadzanie zewnętrznych sił i momentów do ŚZŚ
1.1. Momenty F i h działają w płaszczyźnie X07 i skierowane w ujemnym kierunku
1.2. Siła S-cos 77 powoduje momenty i siły w płasz
czyznach
1.2.1. Txoz= +S-cos 7rh.
1.2.2. TXOY = -S-cos7v(e-łO,5a).
1.2.3. Sx = +S-cos71.
1.3. Siła S-sin 71 powoduje momenty i siły w płaszczyznach
1.3.1. Txoz-~ł-S •sin 7/ - g.
1.3.2. Tyoz - +S • sin 7r(e+0,5a).
1.3.3. Sz = -S-sin7,.
1.4. Siła Fwy-cos 72 powoduje momenty i siły w płaszczyznach 1.4. 7. Txoz = -F^y-cos 72-h.
1.4.2. Txoy ■=■ -Fwy ■ cos 7z (c+0,5a).
1.4.3. Sx — Fwy -cos 72.
|
'yoz ■% |
ii | |
|
ri |
\\f JśAsi. |
hi |
|
! |
r |
= \0\/(4f) (f=0, 1)
PARAMETRY ZADANE:
|
i | |
|
+7 |
4+ |
r,_4 = \Tx0y\/(4fR) (f=o, i).
(R= I(0,5Q)2+(0,5bP ).
Rys. 1.5.13.10. Schematy Ą* | | 6,-*
do wyznaczenia =®/4,
obciążenia w śrubach (h~4~~ 0/4).
Schemat reduktora z niezbędnymi wymiarami i zadanymi kierunkami obracania wałów (rys. 1.5.13.11).
Wejściowy moment T}.
Kierunek momentu jest zgodny z kierunkiem obracania (element napędzany).
Wyjściowy moment T2.
Kierunek momentu jest przeciwny do kierunku obracania (element napędzający).
Siły obciążające wysięgowe odcinki wałów — Fwy i S.
Kierunki sił Fwy i S wynikają z rozplanowania napędu.
Rys. 1.5.13.11. Schemat reduktora ; Si(a rwy-sin72
obciążonego zewnętrznymi i siły w płaszczyznach
siłami i momentami 1.5.1. Txoz=+Fwy sin72 j.
1.5.2. TYOZ = ±Fwysin72.(c+0,5a).
1.5.3. Sz =-j-FWy-sm 7p-
2. Wyznaczanie zewnętrznych sił i momentów działających w oddzielnych płaszczyznach
2.1. Płaszczyzna X07:
ZTxoz =-T,-TP -ł-TX0z(l.2.1)+TX0Z(1.3.1)+
+ Txoz(1.4. 1)+TX0z(1.5. 1).
z.2. Płaszczyzna Y07i j)TYOZ—TYQZ(1.3.2)-hTYQZ(1.5.2).
2.3. Płaszczyzna XOY: XTxor = TX0Y(1.2.2) + Txor(l. 4.2).
2.4. Płaszczyzna XOY: £fxoy = \ S-cos 7j-Fwy cos 72\.
2.5. Oś 7: HFZ ■= | Fwy- sin 72 - S-sin 7, |.
3. Wyznaczanie sił obciążających śruby złącza
3.1. Płaszczyzna X07 — rys. 1.5.13. Wal.
3.2. Płaszczyzna Y07 - rys. 1.5.13.10a2.
3.3. Płaszczyzna XOY - rys. 1.5.13.10b.
3.4. Płaszczyzna XOY - rys. 1.5.13.1 Oc.
3.5. Oś 7 - rys. 1.5.13.1 Od.
Po wykonaniu p.3.1+3.5 należy podsumować siły obciążające śruby 1 + 4 i określić śrubę o największym obciążeniu Fmox.
4. Obliczanie średnicy śruby o największym obciążeniu
„ h ,3-4-Fmax__Fmox - sumaryczne maż ob- y
dj - y ^-k-« mm' ciążenie śruby, N (p.3),
kr-Re/3; Re (tabl. 4.2.1).
Dobór średnicy śruby d-1(d3) (tabl. 2.5.3).
Wyszukiwarka
Podobne podstrony:
1511.5.13.4. ŚRUBY ŁĄCZĄCE REDUKTOR Z RAMĄ. OBLICZANIE [20], [21] 4) F,;<
151 2 151.5.13.4. ŚRUBY ŁĄCZĄCE REDUKTOR Z RAMĄ. OBLICZANIE [20], [21] Obliczanie śrub łączących red
151.5.13.4. ŚRUBY ŁĄCZĄCE REDUKTOR Z RAMĄ. OBLICZANIE [20], [21] Obliczanie śrub łączących reduktor
87 87 Ynleius y expeiimentnles Yoleursy piedites1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 1" 18
skanowanie0003 Spis treści • 03 05-11 11 -13 13-14 15-18 18-19 20-21 22-25 26 URSA GLASSWOOL*Wymagan
3 H10, 11 12 13 14 15 16, 17’•! 19, 20. 21, <2. 23. 24 J 23 J
6 9 10* 12 13 1415 16 17 18 19 20** 21 22 23 24 25** 26 27 28 29 30GR 3 ds.
CM O 21 22 23 24 25 26 29 30 31Lipiec Pn Wt Śr Cz Pt Sb 1 2 4 5 6 7 8 9 11 12 13 14 15 16 18 19
CCF20110119�024 GODZINA DZIEŃ MIESIĄC TIME DAY MONTH b 7 8 =1 10 11 12 13 14 15 Ib 17 16 1*1 20 21 2
CCF20110119�026 GODZINA DZIEŃ HIESIĄC TIME b 7 8 T 10 11 12 13 14 15 Ib 17 18 1*1 20 21 22 DAY 1 2 3
CCF20110119�034 GODZINA DZIEŃ MIESIĄC TIME DAY MONTH b 7 A 1 10 11 12 13 14 1S Ib 17 lfl M 20 21 22
CCF20110119�038 GODZINA DZIEŃ MIESIĄC TIME DAY MONTH t 7 fi 1 10 11 12 13 14 15 Ib 17 Ifi M 20 21 22
Ol 1 2 3 4 5 67 8 9 10 1112 13 14 15 1617 18 19 20 21 22 23 24 25 26 27 28 29 30 31 1 2 3 4 5 6 7 8
kalendarz3(2) Styczeń l 2 3 4 5 6 7 8 9 10 11 12 13 14 1? 16 17 18 19 20 21 22 23 24 25 26 27 28 29
kalendarz(2) Styczeń Pn Wt Sr Cz Pt S N 2 3 4 7 8 9 10 11 1 13 14 15 16 17 18 1 20 21 22 23 24
więcej podobnych podstron