3tom239
8. ELEKTROENERGETYCZNA AUTOMATYKA ZABEZPIECZENIOWA 480
izolacji. Termiczne starzenie izolacji jest najczęściej wywołane przez przetężenia. Niekiedy przyczyną nadmiernego wzrostu temperatury jest uszkodzenie w systemie chłodzenia, co powoduje zmniejszenie ilości wody przepływającej przez kanały chłodzące uzwojenie statora.
Uszkodzenia wirników mogą mieć następującą postać:
— pojedyncze doziemienie uzwojenia wzbudzenia;
— dwupunktowe doziemienie (zwarcia przez konstrukcje);
— odłączenie uzwojenia wzbudzenia od źródła zasilania;
— nadmierny wzrost temperatury uzwojenia wzbudzenia.
Pojedyncze doziemienie uzwojenia wzbudzenia jest uszkodzeniem bezpośrednio niegroźnym. Uziemienia dwupunktowe natomiast wywołują przepływ prądu przez konstrukcje, odkształcenie pola wzbudzenia, duże zmiany momentu. Odłączenie uzwojenia wzbudzenia od źródła zasilania powoduje zanik strumienia i utratę stabilności oraz bieg asynchroniczny z jego konsekwencjami zarówno dla generatora, jak i dla odbiorów potrzeb własnych.
Nadmierny wzrost temperatury uzwojenia wzbudzenia jest wywołany przez;
— zbyt długie forsowanie wzbudzenia;
— asymetrię prądów (obecność składowej przeciwnej w prądach stojana) transformowanych do uzwojeń wirnika.
Uszkodzenia mechaniczne są rzadkie, a ich postać bywa następująca:
— osiowe przesunięcie wału turbozespołu;
— nadmierna wibracja wału, fundamentu, żelaza statora lub uzwojeń stojana;
— zmęczeniowe uszkodzenie wału lub sprzęgła między turbiną a generatorem.
8.2.6. Uszkodzenia silników
Częstość uszkodzeń silników jest znaczna i zmienia się w szerokich granicach. Zależy ona zarówno od jakości wykonania, jak też od sposobu eksploatacji. Uszkodzenia silników i kompensatorów synchronicznych mogą być takie jak w przypadku generatorów.
W silnikach indukcyjnych mogą wystąpić:
— zwarcia międzyfazowe i doziemne stojana;
— zwarcia zwojowe w stojanie;
— zwarcia zwojowe w wirniku;
— nadmierny wzrost temperatury izolacji (często prowadzący do zwarcia).
Ten ostatni rodzaj zakłócenia bywa wywołany przez:
— nadmierny moment mechaniczny;
— nieudany rozruch (samorozruch i utknięcie);
— przerwę w przewodzie fazowym i niesymetryczne zasilanie;
— pogorszone warunki chłodzenia.
W silnikach indukcyjnych temperatura stojana przy tych zakłóceniach niekiedy jest wyższa niż temperatura wirnika, czasami zaś bardziej nagrzewa się wirnik.
8.2.7. Utrata równowagi współpracy równoległej
Zakłócenia takie jak zwarcia i/lub wyłączenie silnie obciążonej linii mogą spowodować rozszerzenie się awarii poprzez utratę równowagi przejściowej. Na przykład, jeśli powstało zwarcie w torze łączącym elektrownię z siecią przesyłową, to w czasie trwania tego zwarcia przez tor ten albo nie płynie żadna moc (przy zwarciu trójfazowym), albo płynie tylko część mocy przesyłanej przed inicjującym zaburzeniem. W związku z tym, nadwyżka mocy w elektrowni powoduje przyspieszenie wirników generatorów tam zlokalizowanych, a niedobór mocy w systemie — hamowanie generatorów. Wyłączenie zwarcia związane z trwałym wyłączeniem uszkodzonego toru jest przyczyną zwiększenia zastępczej impedancji między elektrownią i siecią przesyłową, co pogłębia trudności. W rezultacie, kąt między zastępczą siłą elektromotoryczną elektrowni a zastępczym napięciem systemu może przekroczyć wartość krytyczną, co wywoła tzw. poślizg biegunów i może prowadzić do trwałego asynchronizmu danej elektrowni.
Do czynników decydujących o utrzymaniu lub utracie równowagi zalicza się:
— rodzaj zwarcia;
— czas trwania zwarcia;
— obciążenie toru przed zwarciem;
— impedancję zastępczą między siecią a elektrownią po wyłączeniu zwarcia.
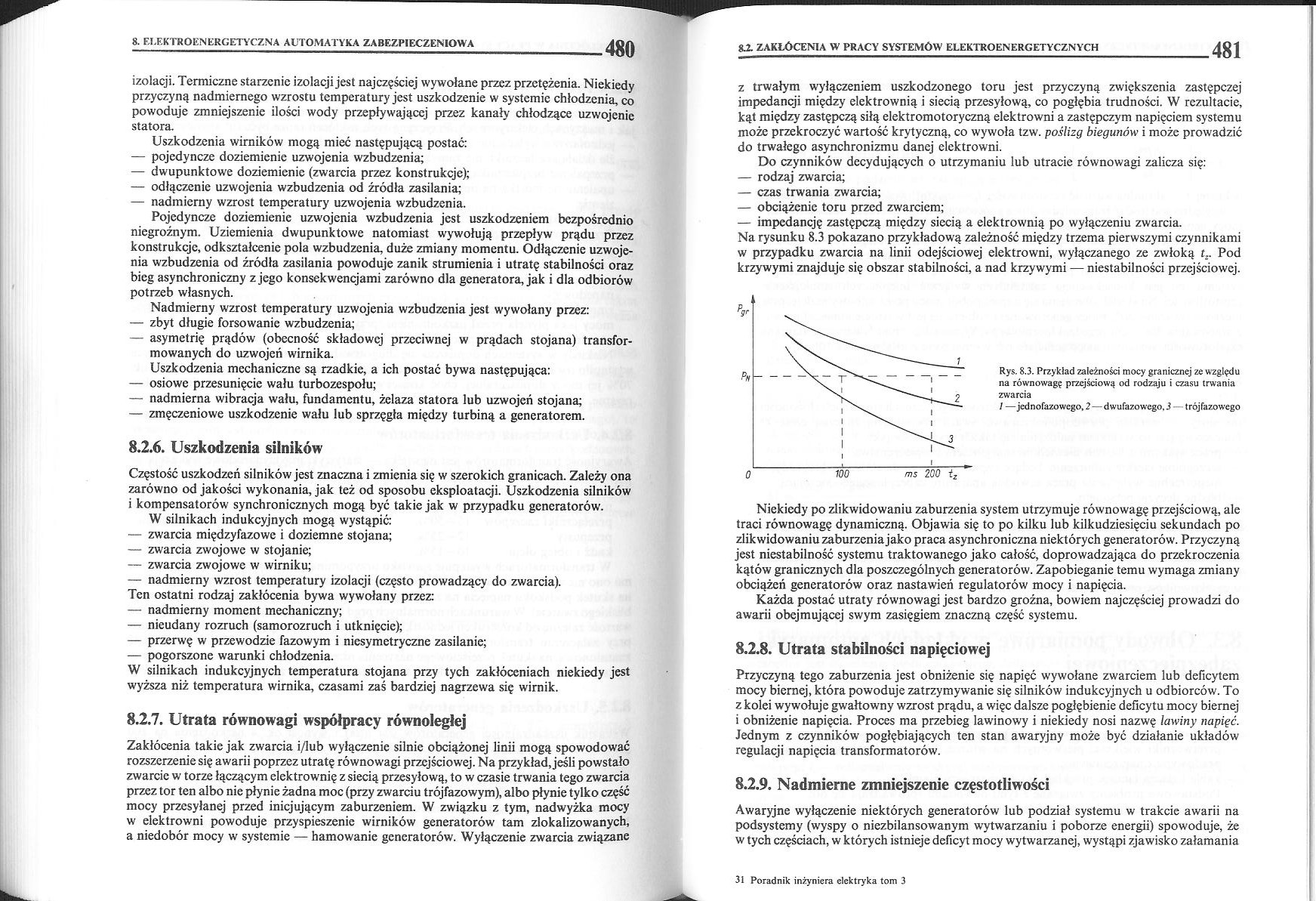
Na rysunku 8.3 pokazano przykładową zależność między trzema pierwszymi czynnikami w przypadku zwarcia na linii odejściowej elektrowni, wyłączanego ze zwłoką t,. Pod krzywymi znajduje się obszar stabilności, a nad krzywymi — niestabilności przejściowej.
Rys. 8.3. Przykład zależności mocy granicznej ze względu na równowagę przejściową od rodzaju i czasu trwania zwarcia
/ —jednofazowego, 2 — dwufazowego, 3 — trójfazowego
Niekiedy po zlikwidowaniu zaburzenia system utrzymuje równowagę przejściową, ale traci równowagę dynamiczną. Objawia się to po kilku lub kilkudziesięciu sekundach po zlikwidowaniu zaburzenia jako praca asynchroniczna niektórych generatorów. Przyczyną jest niestabilność systemu traktowanego jako całość, doprowadzająca do przekroczenia kątów granicznych dla poszczególnych generatorów. Zapobieganie temu wymaga zmiany obciążeń generatorów oraz nastawień regulatorów mocy i napięcia.
Każda postać utraty równowagi jest bardzo groźna, bowiem najczęściej prowadzi do awarii obejmującej swym zasięgiem znaczną część systemu.
8.2.8. Utrata stabilności napięciowej
Przyczyną tego zaburzenia jest obniżenie się napięć wywołane zwarciem lub deficytem mocy biernej, która powoduje zatrzymywanie się silników indukcyjnych u odbiorców. To z kolei wywołuje gwałtowny wzrost prądu, a więc dalsze pogłębienie deficytu mocy biernej i obniżenie napięcia. Proces ma przebieg lawinowy i niekiedy nosi nazwę lawiny napięć. Jednym z czynników pogłębiających ten stan awaryjny może być działanie układów regulacji napięcia transformatorów.
8.2.9. Nadmierne zmniejszenie częstotliwości
Awaryjne wyłączenie niektórych generatorów lub podział systemu w trakcie awarii na podsystemy (wyspy o niezbilansowanym wytwarzaniu i poborze energii) spowoduje, że w tych częściach, w których istnieje deficyt mocy wytwarzanej, wystąpi zjawisko załamania 31 Poradnik inżyniera elektryka tom 3
Wyszukiwarka
Podobne podstrony:
3tom236 8. ELEKTROENERGETYCZNA AUTOMATYKA ZABEZPIECZENIOWA — zwiększa dopuszczalną
3tom237 8. ELEKTROENERGETYCZNA AUTOMATYKA ZABEZPIECZENIOWA 476 Sekwencja przechodzenia systemu z jed
3tom238 8. ELEKTROENERGETYCZNA AUTOMATYKA ZABEZPIECZENIOWA 478 Wpływ na wartość prądów zwarciowych,
3tom241 8. ELEKTROENERGETYCZNA AUTOMATYKA ZABEZPIECZENIOWA 484 Współczynnik bezpieczeństwa przyrządó
09 09 Dokumentacja techniczno-ruchowa elektroenergetycznej automatyki zabezpieczeniowej 103 Zespól
Synal B.: Elektroenergetyczna automatyka zabezpieczeniowa. WPWr., Wrocław 2000. Laudyn D., Pawlik M.
08 05 Dokumentacja techniczno-ruchowa elektroenergetycznej automatyki zabezpieczeniowej 101 Przekaźn
09 09 Dokumentacja techniczno-ruchowa elektroenergetycznej automatyki zabezpieczeniowej 103 Zespól
04 06 Dokumentacja techniczno-ruchowa elektroenergetycznej automatyki zabezpieczeniowej 97 Napięcie
09 09 Dokumentacja techniczno-ruchowa elektroenergetycznej automatyki zabezpieczeniowej 103 Zespól
Uczciwek011 2 [20] Wróblewski J. Zespoły elektroenergetycznej automatyki zabezpiec
pamparampampam (2) 1. Wstęp Laboratorium elektroenergetycznej automatyki zabezpieczeniowej Instytutu
01 02 10 Grzegorz Kasprzak - Elektroenergetyczna Automatyka Zabezpieczeniowa2. Pomiar czasów zadział
04 05 96 Grzegorz Kasprzak - Elektroenergetyczna Automatyka Zabezpieczeniowa Przekaźnik napięciowy
09 02 48 Grzegorz Kasprzak - Elektroenergetyczna Automatyka Zabezpieczeniowa wyzwalanie napięciem).
09 10 104 Grzegorz Kasprzak - Elektroenergetyczna Automatyka Zabezpieczeniowa - uk
Praca zbiorowa pod redakcją Wilibalda WINKLERA ELEKTROENERGETYCZNA AUTOMATYKA ZABEZPIECZENIOWAw
więcej podobnych podstron