fiz02
Mechanika klasyczna i relatywistyczna
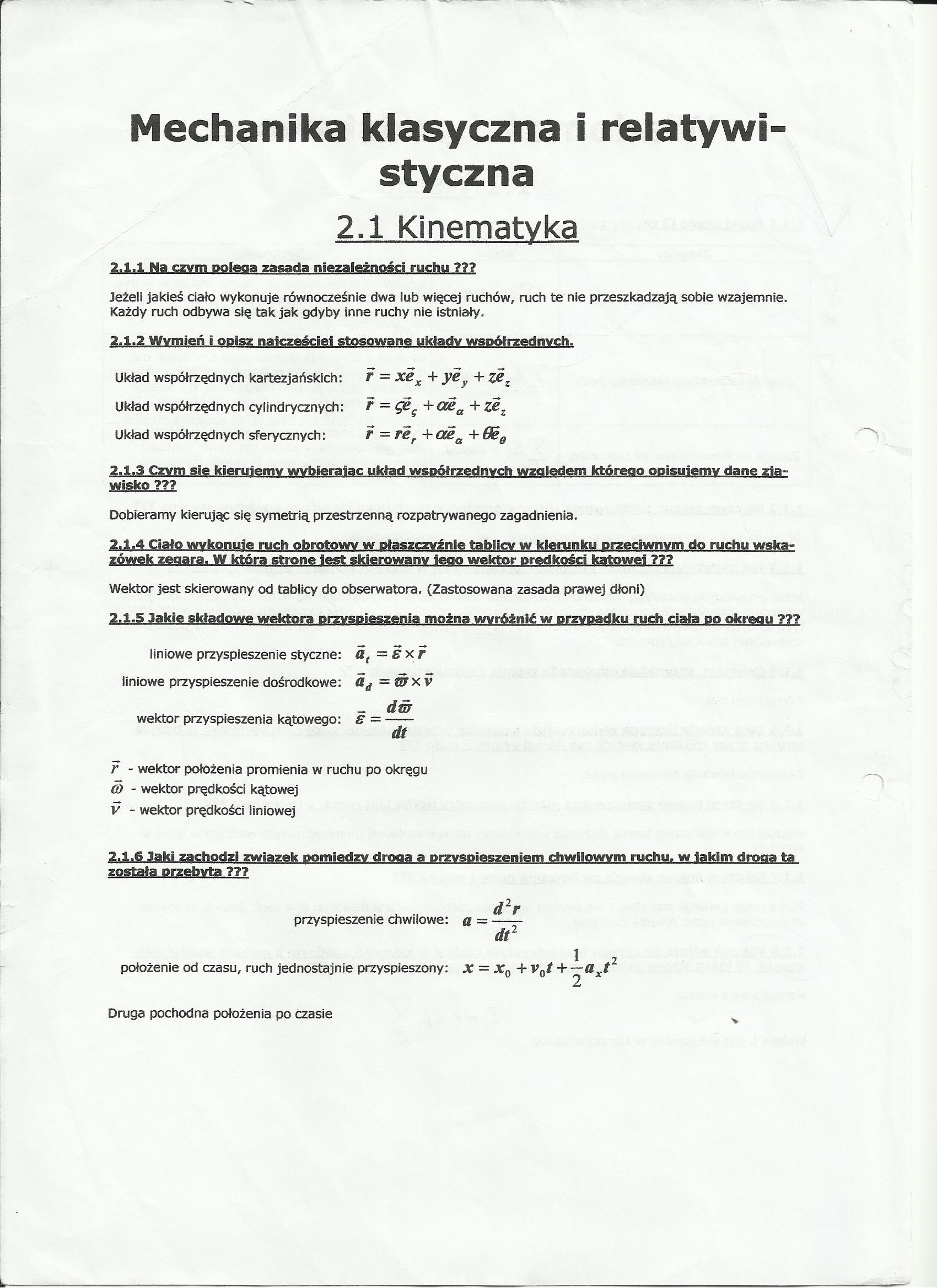
2.1 Kinematyka
2.1.1 Na czym polega zasada niezależności ruchu ???
Jeżeli jakieś ciało wykonuje równocześnie dwa lub więcej ruchów, ruch te nie przeszkadzają sobie wzajemnie. Każdy ruch odbywa się tak jak gdyby inne ruchy nie istniały.
2.1.2 Wymień i opisz najczęściej stosowane układy współrzędnych.
Układ współrzędnych kartezjańskich: T — xex + yey + Z&z Układ współrzędnych cylindrycznych: f — ęeę +ccea + 7fiz Układ współrzędnych sferycznych: T — T6r + aea+0ee
2.1.3 Czym Sie kierujemy wybierając układ współrzędnych względem którego opisujemy dane zjawisko ???
Dobieramy kierując się symetrią przestrzenną rozpatrywanego zagadnienia.
2.1.4 aało wykonuje ruch obrotowy w płaszczyźnie tablicy w kierunku przeciwnym do ruchu wska-gpj«e-k_xegara. .W która stronę iest skierowany jego wektor prędkości kątowej ???
Wektor jest skierowany od tablicy do obserwatora. (Zastosowana zasada prawej dłoni)
2.1.5 Jakie składowe wektora przyspieszenia można wyróżnić w przypadku ruch ciała po okręgu ???
liniowe przyspieszenie styczne: at = £ x r liniowe przyspieszenie dośrodkowe: CLd = ^xv
dm
wektor przyspieszenia kątowego: £ —-
dt
r - wektor położenia promienia w ruchu po okręgu 6) - wektor prędkości kątowej V - wektor prędkości liniowej
2.1.6 Jaki zachodzi związek pomiędzy drogą a przyspieszeniem chwilowym ruchu, w jakim droga ta została przebyta ???
przyspieszenie chwilowe: położenie od czasu, ruch jednostajnie przyspieszony:
■V
Druga pochodna położenia po czasie
Wyszukiwarka
Podobne podstrony:
37. Na czym polega zasada świadomego i aktywnego udziału uczestników w procesie
1. Na czym polega zasada powierzeniakoinpetencji i jakie są jej konsekwencje 1 2.
1. Na czym polega zasada powierzenia kompetencji i jakie są jej konsekwencje? Zasada polega na tym ż
5. Na czym polega zasada binarnego odkładania ekspotencjalnego w sieci Ethernet i
Test O - WprowadzenieTest 0 - Wprowadzenie Zadanie 1. (0-5) 1. Wyjaśnij, na czym polegała zasada leg
Na czym polega zasada większości względnej i kiedy jest stosowana w Polsce? Zasada ta odnosi się do
14. Na czym polega zasada organizacji biur wielkoprzestrzennych, grupowych, oraz
1546368p6559376054784U1877787 n 17 E O 7%CHXWskaż na czym polega mechanizm bakteriobójczego działani
12. Korzystając z podręcznika wyjaśnij, na czym polega mechanizm pług and play. 13
12. Korzystając z podręcznika wyjaśnij, na czym polega mechanizm pług and play. 13
27 (325) Rozdział X 33 / 51 Na czym polega mechanizm wzrostu perlitu? / periit, który jest mieszanin
500 501 (3) 500 CłęW III. Podttim makroekonomii Powstaje jednakże pytanie: na czym polegają mechaniz
Obraz (272) Na czym polega mechanizacja odlewania kokilowego? Jaka jest istota metody odlewania półk
11493)9682806823564X2892637 n 17 tO ■>% CHXWskaż na czym polega mechanizm bakteriobójczego działa
11493)9682806823564X2892637 n 17 tO ■>% CHXWskaż na czym polega mechanizm bakteriobójczego działa
1546368p6559376054784U1877787 n 17 E O 7%CHXWskaż na czym polega mechanizm bakteriobójczego działani
więcej podobnych podstron