kontrolery poziomu cieczy przewodzącej
Kontrolery poziomu cieczy przewodzących
Antoni Białoszewski
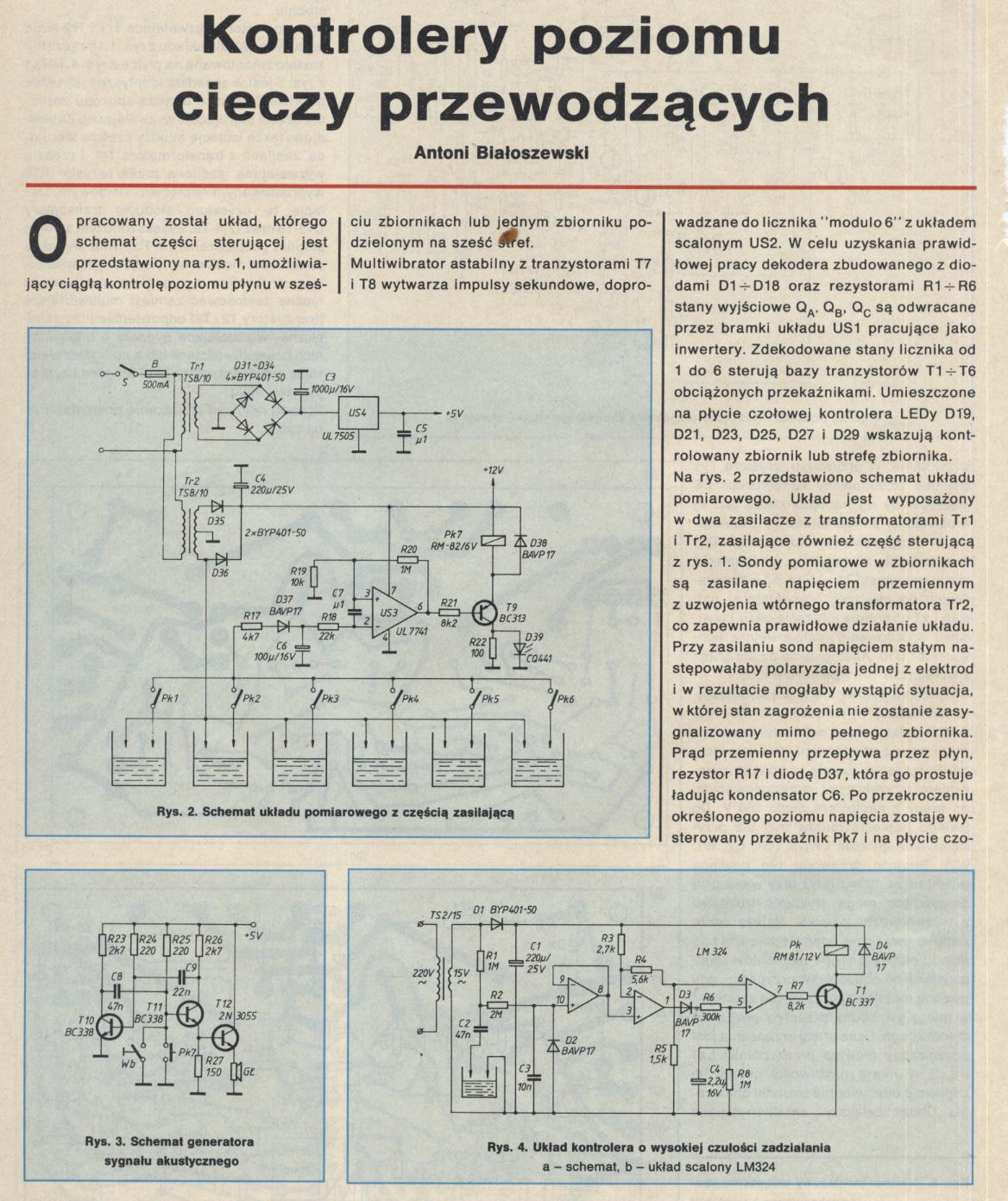
Opracowany został układ, którego schemat części sterującej jest przedstawiony na rys. 1, umożliwiający ciągłą kontrolę poziomu płynu w sześ
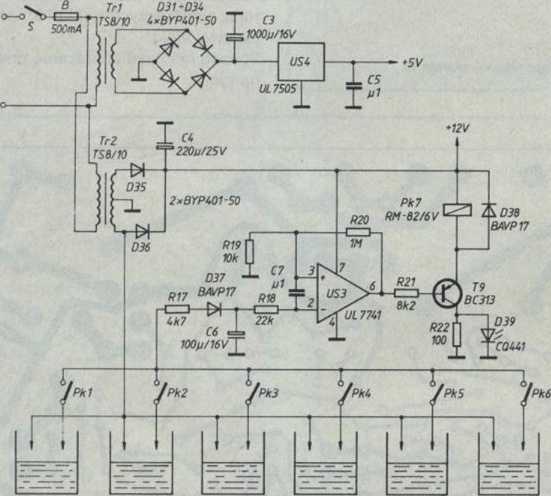
Rys. 2. Schemat układu pomiarowego z częścią zasilającą
ciu zbiornikach lub jednym zbiorniku podzielonym na sześć ^ef.
Multiwibrator astabilny z tranzystorami T7 i T8 wytwarza impulsy sekundowe, dopro
wadzane do licznika "modulo6" z układem scalonym US2. W celu uzyskania prawidłowej pracy dekodera zbudowanego z diodami D1-^D18 oraz rezystorami R1-^R6 stany wyjściowe QA. QB, Qc są odwracane przez bramki układu US1 pracujące jako inwertery. Zdekodowane stany licznika od 1 do 6 sterują bazy tranzystorów T1+T6 obciążonych przekaźnikami. Umieszczone na płycie czołowej kontrolera LEDy D19, D21, D23, D25, D27 i D29 wskazują kontrolowany zbiornik lub strefę zbiornika.
Na rys. 2 przedstawiono schemat układu pomiarowego. Układ jest wyposażony w dwa zasilacze z transformatorami Tr1 i Tr2, zasilające również część sterującą z rys. 1. Sondy pomiarowe w zbiornikach są zasilane napięciem przemiennym z uzwojenia wtórnego transformatora Tr2, co zapewnia prawidłowe działanie układu. Przy zasilaniu sond napięciem stałym następowałaby polaryzacja jednej z elektrod i w rezultacie mogłaby wystąpić sytuacja, w której stan zagrożenia nie zostanie zasygnalizowany mimo pełnego zbiornika. Prąd przemienny przepływa przez płyn, rezystor R17 i diodę D37, która go prostuje ładując kondensator C6. Po przekroczeniu określonego poziomu napięcia zostaje wysterowany przekaźnik Pk7 i na płycie czo-
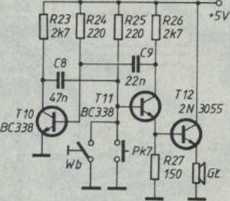
Rys. 3. Schemat generatora sygnału akustycznego
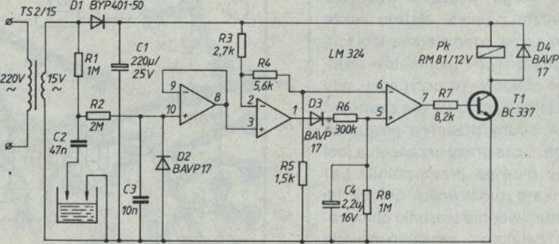
Rys. 4. Układ kontrolera o wysokiej czułości zadziałania
a - schemat, b - układ scalony LM324
Wyszukiwarka
Podobne podstrony:
0312 jpeg Księga 4 • Słownik terminów Przewodnik Wielki Boski. Wniebowstąpiony Mistrz, którego pozio
Egzamin maturalny z biologii Poziom rozszerzony Zadanie 17. (1 pkt) Na rysunku przedstawiono schemat
9. Masa odpadów opakowaniowych ze stali i aluminium oraz poziom recyklingu Według danych opracowanyc
skanuj0015 (281) ECDL Advanced - Przetwarzanie tekstu, poziom zaawansowany Jedną z opcji jest m.in.
P1010388 T7. Budowa układu bodźcotwórczo — przewodzącego serca Ryc. 19. Układ bodźcotwórczo — przewo
przekazali pod kontrolę Aten Wszyscy dotychczasowi mieszkańcy Aten zostali wysiedleni a na ich miejs
więcej podobnych podstron