mech2 111
»l|'l I
1"’V.V "V.jfni 1^' tu t mii * i n !• Im-ił i wilnofm 1 n sileniu ofcrnoaJąai»Kn ri \ v j
stałej oąi ig względom tej osi, *
V- = u) 2 Ig*
Zx2 * - ■j*|) “2 - 4aat 4,21
Mx2 = T2R2 ~ G3r2 “ Mo*
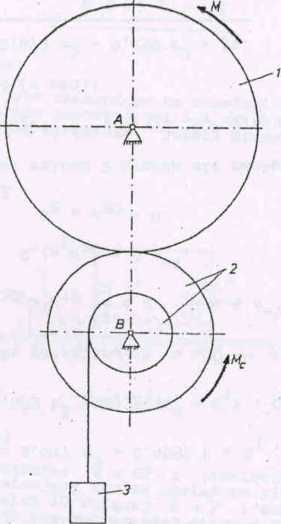
Eys. 152a
<Jeżeli przypomnimy, że = T, widziny, że mamy układ dwóch rów
nań z dwiema niewiadomymi
* ' E,
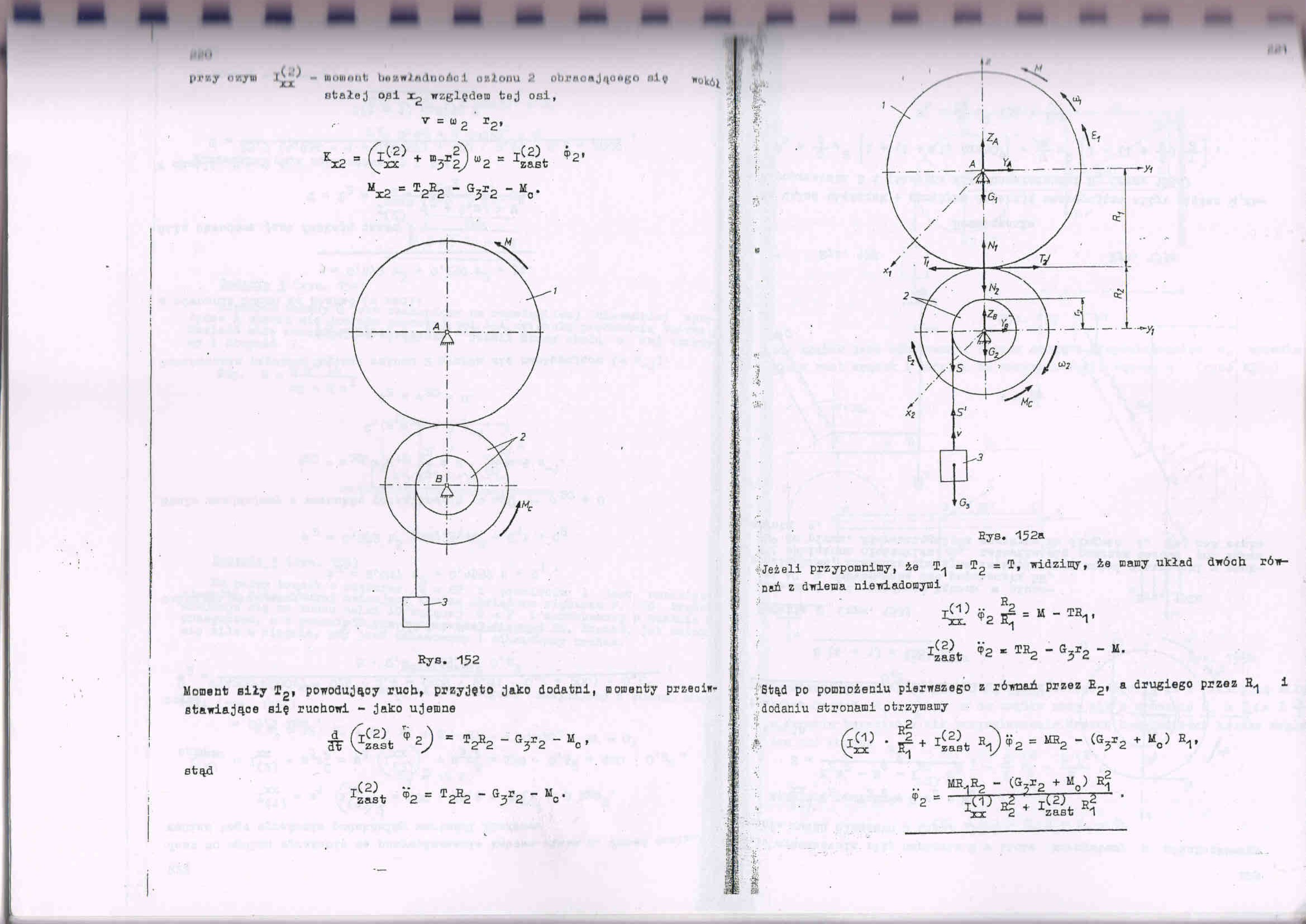
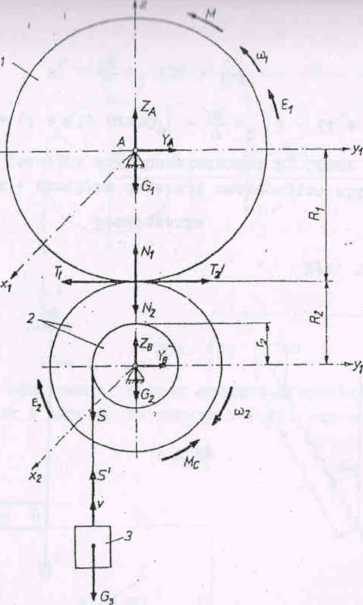
Rys. 152
Moment siły Tg, powodująoy ruch, przyjęto Jako dodatni, momenty przeciwstawiające się ruobowi - Jako ujemne
stąd
5 aj) * *282-83*2-“o*
Tzast ^*2 = T2R2 “ G3r2 “ Mo *
Jzast ?2‘TB2“ G3r2 " “■
Stąd po pomnożeniu pierwszego z równań przez Eg, a drugiego przez i
23
,2
'2
4
; i dodaniu stronami otrzymamy
1 Vi
ME^Rp - (G,r2 + Mq)
*2 = rCi; e2 jiz; R2 * ■Sec *2 4 izaBt K1
Wyszukiwarka
Podobne podstrony:
■darmo: - p
Personifikacja Sparwiedliwości i rotropności (2) >>v j«a „j I) £ . W U *H V® • 111 % rw
IMAG0292 (2) <*# * t *i Ą 1.1 1U1 im! *ł‘» »v
=- U iM^y /•^ fitCcwe* , ^.y #“4‘* < Jl , «/l£-i- ^,l v‘-J w pzycJ,**/*-
U«*IM «l IM frol •» IM •MIII*. IM rift#M Aladdin, ianimateur 3D meconnu. offertes par le reseau mond
56943 tatting rosettes dusenbury beaded newsletter fMii i IM:l. iMJałliB* .* I*V> r.A r MAKII l»*
ak wiele mii si się zmienić IgMU W§} ■ ■* _T Tu?3at im
33770 Obraz04 (3) lucacaIk 001(0- £® fna_ * śf Ste .tu a pjt ł iM Vi cropflt (. tó i r:r. H i vM>
skanuj0017 (55) pil)
więcej podobnych podstron