mech2 29
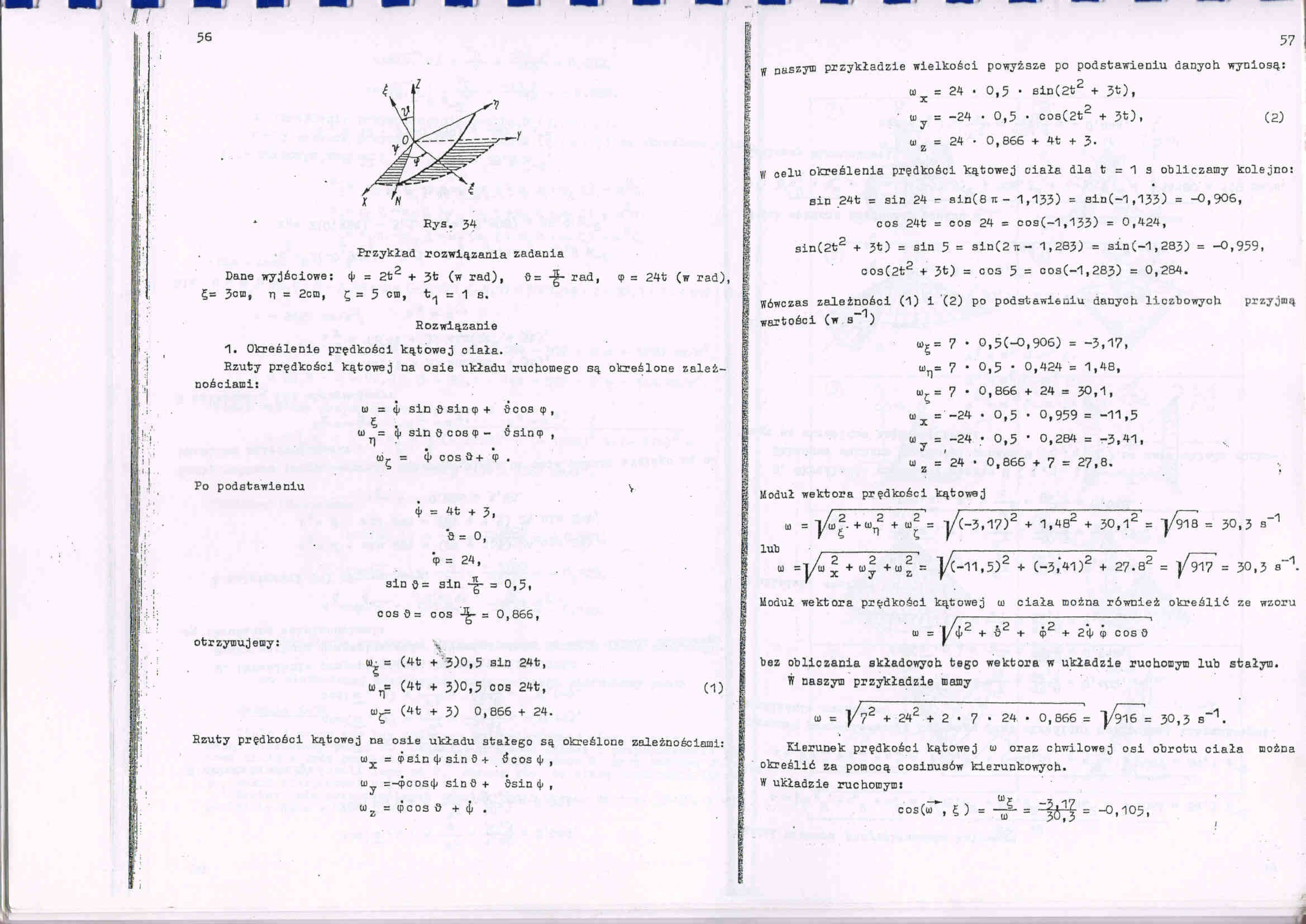
Rys. 34
Przykład rozwiązania zadania
Dane wyjściowe: cjj = 2t^ + 3t (w rad), a = rad, tp = 24t (w rad), ę= 3cm, n = 2cm, ę = 5 en, = 1 b.
Rozwiązanie
1. Określenie prędkości kątowej ciała.
Rzuty prędkości kątowej na oaie układu ruchomego są określone zależnościami:
to = 4* sin 8 sin <P + 9cos <p,
l .
id = cb sino cos <p - asincp , R •
GOę = 4> COS a + (p .
V
Po podstawieniu
(i. = 4t + 3,
a = o,
q> = 24,
sin a = sin = 0,5, cos 5= cos -^- = 0,866,
otrzymujemy: .
Wę = (4t +3)0,5 sin 24t,
U(4t + 3)0,5 cos 24t, (1)
Wę= (4t + 3) 0,866 + 24.
Rzuty prędkości kątowej na osie układu stałego są określone zależnościami:
u);x = cpeinf}'sina+ tfcos^,
iDy =-cpcos4j sina + dsin <J* , id2 = ipeos a + ({; .
ff naSzyTD przykładzie wielkości powyższe po podstawieniu danyoh wyniosą:
|
U) = 24 • X |
0,5 • BiD(2t2 + 3t), | |
|
tuy = -24 |
. 0,5 • cos(2t2 + 3t), |
(2) |
|
u,z = 24 • |
0,866 + 4fc + 3. |
V/ oelu określenia prędkości kątowej ciała dla t = 1 s obliczamy kolejno:
sin 24t = sin 24 =■ sin(8n- 1,135) = sin(-1 ,133) = -0,906, cos 24t = cos 24 = cos(-1,133) = 0,424, sin(2t2 + Jt) = sin 5 = sin(2tc - 1,283) = sin(-1,283) = -0,959, cos(2t2 + 3^) = cos 5 = cos(-1,283) = 0,284.
Wówczas zależności (1) i (2) po podstawieniu danych liczbowych przyjmą wartości (w a ^)
o>ę= 7 • 0,5(-0,906) = -3,17, oJn= 7 * 0,5 • 0,424 = 1,48, u)ę = 7 • 0,866 + 24 = 30,1,
= -24 • 0,5 • 0,959 = -11,5 UJ = -24 : 0,5 • 0,284 = -3,41,
" 9
ui = 24 • 0,866 + 7 = 27,8. ..
Moduł wektora prędkości kątowej
lub
, . yu*.+w^2 + t»2 = t/c-3,17)2 + l.^e2 + 30,12 = -j/918 = 30,3 = ]/»
-1
2 2 2 x +uły + tJ,z
= ]/(-11,5)2 + (-3,41 )2 + 27
917 = 30,3 s
-1
| Moduł wektora prędkości kątowej tu ciała można również określić ze wzoru
tu = j/tfi2 + h2 + <p2 + 2tp tp cos 0'
bez obliczania składowyoh tego wektora w układzie ruchomym lub stałym.
W naszym przykładzie mamy
w = j/?2 + 242 + 2 • 7 • 24 • 0,866 = "j/916 = 30,3 s~1.
Kierunek prędkości kątowej tu oraz chwilowej osi obrotu ciała nożna określić za pomocą cosIdusów kierunkowych.
W układzie ruchomym:
, S ) = = -0,105,
Wyszukiwarka
Podobne podstrony:
mech2 37 72 Przykład rozwiązania zadania Dane: schemat meohaniznm (rya. 46): O^A = O^B = 20 cm,
mech2 37 72 Przykład rozwiązania zadania Dane: schemat meohaniznm (rya. 46): O^A = O^B = 20 cm,
83 2 83 Rys. 4.28. Przykład rozwiązania zadania 4.1: a) rysunek aksonometryczny, b) rzuty prostokątn
301 (16) 301 Rys. 7.61. Przykład rozwiązania zadania 7.5: a) przykład tematu, b) rysunek części
306 (17) 306b) 80 Rys. 7.65. Przykład rozwiązania zadania 7.7: a) widok tulei, b)
86 (88) 86 Rys. 4.32. Przykład rozwiązania zadania 4.3: Rys. 4.33 a) rysunek akson
105 Rys. 4.37. Rzuty prostokątne - przykłady do zadania 4.5 Rys. 4.38. Przykład rozwiązania zadania
199 2 199 Rys. 5.44. Przykład rozwiązania zadania 5.3: a) widoki wałka i tulei, b) przekrój połówkow
sciaga na wymiarowanie 65 Rys. 7.57. Przykład rozwiązania zadania 7.3
196 2 196 Rys. 5.42. Przykład rozwiązania zadania 5.2: a) widoki złącza gwintowego, b) przekrój połó
Gwintowe 1 Rys. 5.42. Przykład rozwiązania zadania 52: a) widoki złącza gwintowego, b) przekrój połó
208 2 208 Rys. 5.46. Przykład rozwiązania zadania 5.4: a) rysunek podzespołu, b) zapis umowny połącz
Rys.7.58. Przykłady tematów do zadania 7.3 Rys. 7.59. Przykład rozwiązania zadania 7.4
84 (91) 84 Rys. 4.29. Rysunek aksonometryczny - przykłady do zadania 4.1 Rys. 4.31 Rys. 4.30. Przykł
K 10 (5) P Z ł Przykład rozwiązania zadania Ciała A i B są prostymi kołowy®^ stożkami (rys. 38}. Dan
więcej podobnych podstron