mech2 37
72
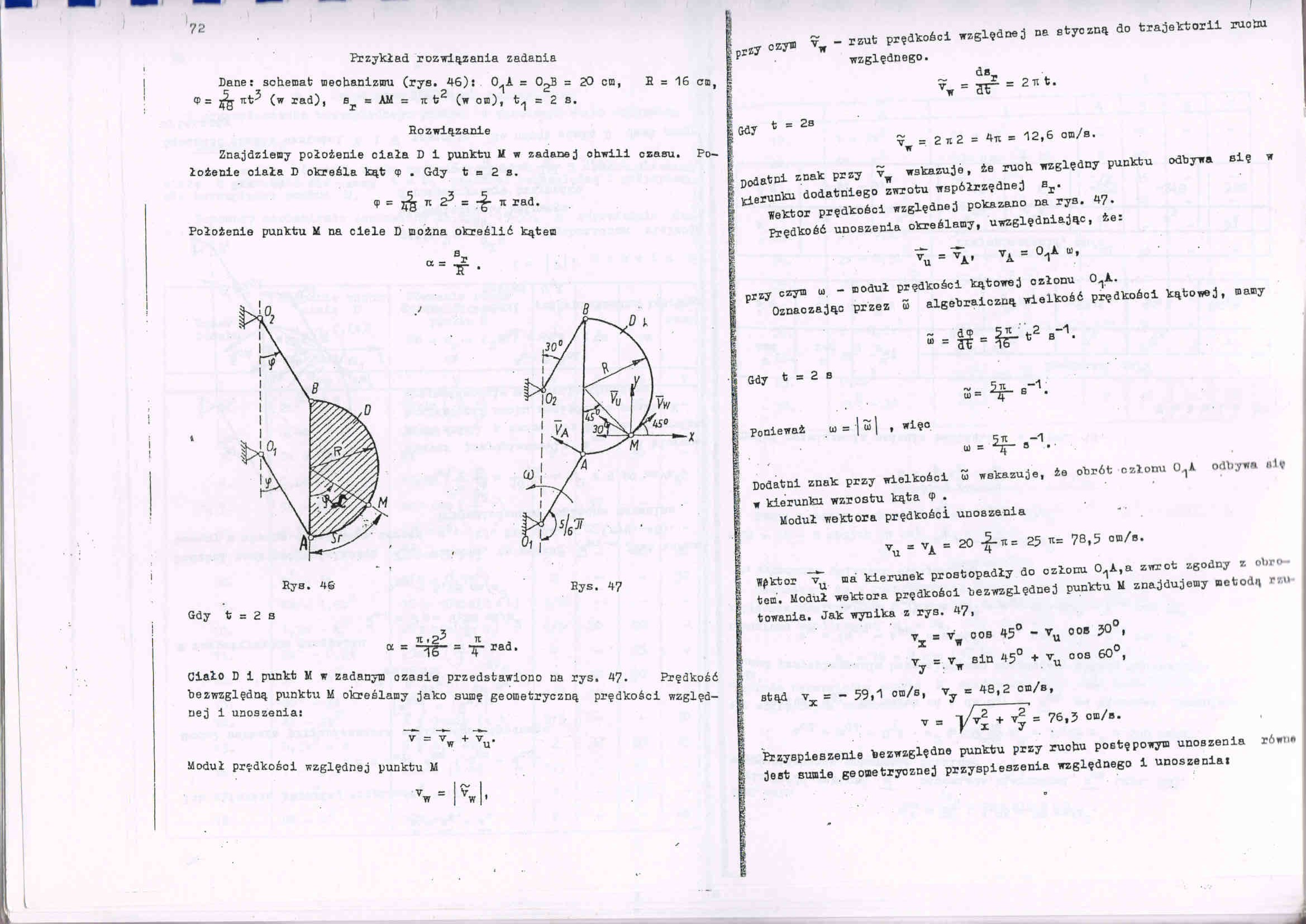
Przykład rozwiązania zadania Dane: schemat meohaniznm (rya. 46): O^A = O^B = 20 cm, cp = ^ (w rad), s^ = AM = tc t2 (w om), t^ = 2 a.
H as 16
Hozwiązanie
Znajdziemy położenie ciała D i punktu M w zadanej obwili czasu. Położenie oiała B określa kąt cp . Gdy t = 2 a.
= rad.
Położenie punktu M na ciele D można określić kątem


t = 2s
v_ = 2 ii 2 = 4ti = 12,6 om/s.
podatni znak przy vw wskazuje, że ruoh względny punktu odbywa się w | tierunku dodatniego zwrotu współrzędnej ar.
Wektor prędkości względnej pokazano na rys. 47.
Prędkość unoszenia określamy, uwzględniając, że:
\ = Ti' TA = °1A “•
przy czym ui - moduł prędkości kątowej ozłonu O^A.
Oznaczając przez 55 algebraiczną wielkość prędkośoi kątowej, mamy
Gdy t = 2 B
Ponieważ u> = I u51 , więo
u> = dLif- s .
5J_ -1 u = ■‘t— a . •
Dodatni znak przy wielkości u! wskazuje, że obrót ozłonu O^A odbywa tilę w kierunku wzrostu kąta <P .
Moduł wektora prędkości unoszenia
ru = = 20 -5-n= 25 *= 78,5 om/s.
Gdy t = 2
Eys. 47
Ciało D i punkt M w zadanym ozaaie przedstawiono na rys. 47. Prędkość
bezwzględną punktu M określamy jako sumę geometryczną prędkości względnej i unoszenia:
Moduł prędkości względnej punktu
V = V + V . w u*
V = v w Iw'
Wiktor vu ma kierunek prostopadły do ozłonu O^A,a ZTrrot zgodny z obr<* • | tem. Moduł wektora prędkośoi bezwzględnej punktu M znajdujemy metodą rzu towania. Jak wynika z rys. 47,
s oob 45° - vu oob 50°,
- Vy = vw sin 45° + vu oos 60°,
stąd y= - 59,1 om/s, V = 48,2 om/8,
X. j
v = -j/v2 + vy = 76,5 om/o.
Przyspieszenie bezwzględne punktu przy ruohu postępowym unoszenia równe jeat sumie geometrycznej przyspieszenia względnego i unoszenia*
Wyszukiwarka
Podobne podstrony:
mech2 109 Rys. 149 rozwiązania zadania 1 dla schematu podanego na rys. 152,gdy Bą dane a 100 kg, m2
mech2 109 Rys. 149 rozwiązania zadania 1 dla schematu podanego na rys. 152,gdy Bą dane a 100 kg, m2
mech2 29 Rys. 34 Przykład rozwiązania zadania Dane wyjściowe: cjj = 2t^ + 3t (w rad), a = rad, tp =
mech2 29 Rys. 34 Przykład rozwiązania zadania Dane wyjściowe: cjj = 2t^ + 3t (w rad), a = rad, tp =
K 10 (5) P Z ł Przykład rozwiązania zadania Ciała A i B są prostymi kołowy®^ stożkami (rys. 38}. Dan
105 Rys. 4.37. Rzuty prostokątne - przykłady do zadania 4.5 Rys. 4.38. Przykład rozwiązania zadania
WYDANIE III/2011 * Strona 17 *PRZYKŁADOWE ROZWIĄZANIE ZADANIA PRAKTYCZNEGO I. Tytu
Slajd32 7 Metoda geometryczna - przykład Rozwiązywanie zadania rozpoczynamy od wyznaczenia zbioru ro
14 Java. Zadania z programowania z przykładowymi rozwiązaniami ZADANIE 1.5 Napisz program, który obl
16 Java. Zadania z programowania z przykładowymi rozwiązaniami ZADANIE 1.7 Napisz program, który obl
12 Java. Zadania z programowania z przykładowymi rozwiązaniami ZADANIE 1.3 Napisz program, który
301 (16) 301 Rys. 7.61. Przykład rozwiązania zadania 7.5: a) przykład tematu, b) rysunek części
306 (17) 306b) 80 Rys. 7.65. Przykład rozwiązania zadania 7.7: a) widok tulei, b)
Wytrzymałość ogólna elementów maszyn Przykładowe rozwiązanie zadania Dla danych: -
więcej podobnych podstron