mech2 3
4
|
1 |
2 |
3 |
|
13 |
5 coa Ą- t2 |
—5 sin y- t2 |
|
.14— |
-2t - 2 |
2 ~ t + 1 |
|
15 |
4 OOS -y t |
-3 sin -g- t |
|
16 |
3t |
4t2 + 1 |
|
17 |
7 sin2 -g- t - 5 |
— 7 oos2 -g- t |
|
18 |
1+3 003 -y t2 |
3 sin | t2 + .3 |
|
19 |
-5t2 - 4 |
3t |
|
20 |
2 - 3t - 6t2 |
3 —|* t - 3t2 |
|
21 |
6 sin -g~ t2 — 2 |
6 cos -g- t2 + 3 |
|
22 |
7t2 - 3 |
5t |
|
23 |
3 - 3t2 + t |
4 - 5t2 + Ą- t |
|
24 |
-4 oos -5- t - 1 3 |
—4 Bin g- t |
|
23 |
-6t |
-2t2 - 4 |
|
26 |
„ 2 n 8 cos -g- t + 2 |
-8 sin2 -g- t - 7 |
|
27 |
-3-9 sin -g- t2 |
-9 cos -g- t2 + 5 |
|
28 |
-4t2 + 1 |
-3t |
|
29 |
5t2+ t -3 |
3t2 + t + 3 |
|
JO |
2 cos -y t2 — 2 |
-2 sin -y t2 + 3 |
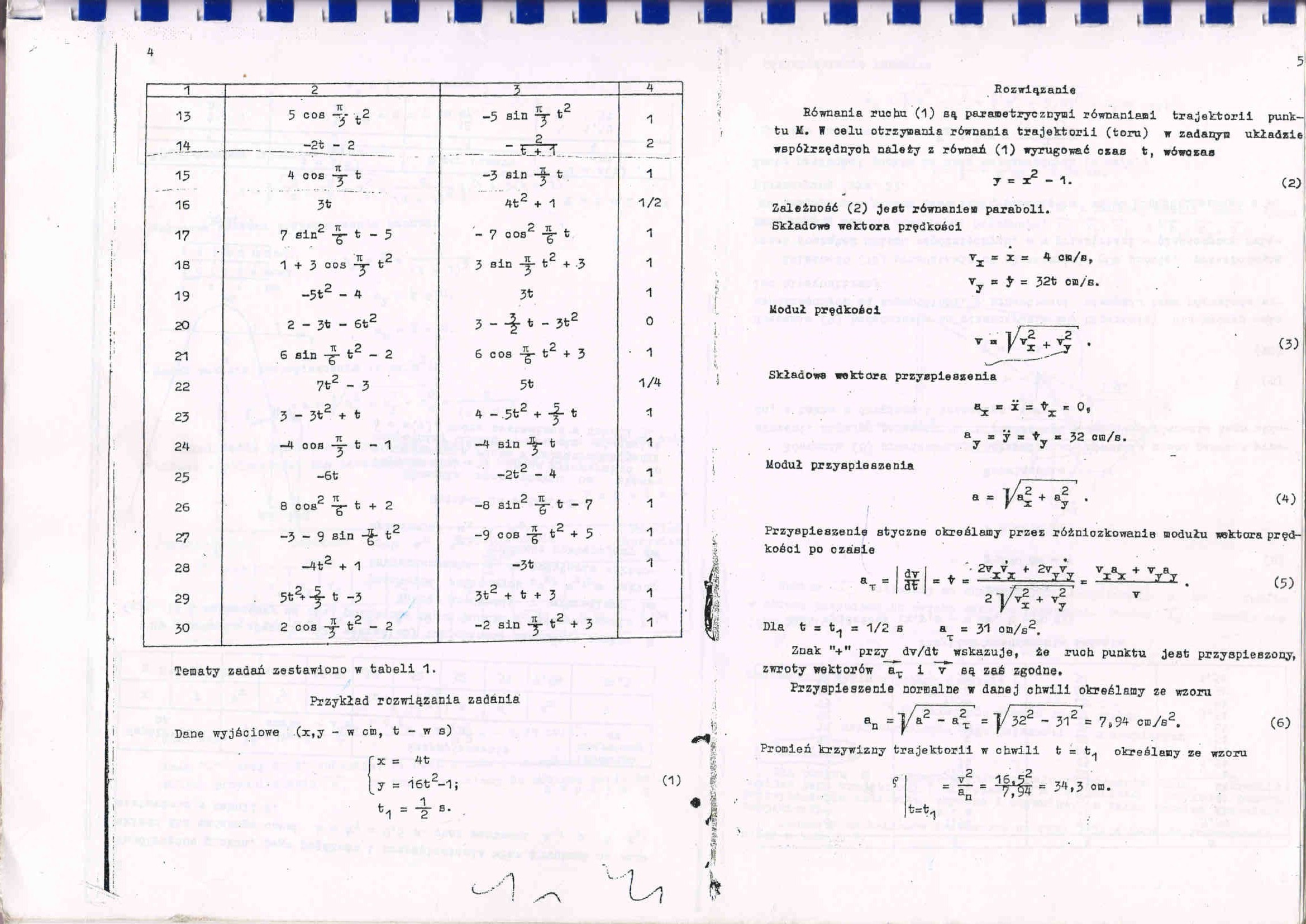
Tematy zadań zestawiono w tabeli 1.
Przykład rozwiązania zadania Dane wyjściowe (x,y - w cin, t - w s)
r x = 4t
[7 = “let2-^

Rozwiązanie
Równania ruohn (1) są parane trycznyrai równaniami trajektorii punktu M. W oelu otrzymania równania trajektorii (toru) w zadanym układzie wepółrzędnyoh należy z równań (1) wyrugować czas t, wówczas
y = X2 - 1.
Zależność (2) jest równaniem paraboli. Składowa wektora prędkości
Tx a I a 4 C»/B, V? a J = J2t om/B.
Moduł prędkośoi
(3)
Składowa wektora przyspieszenia
Moduł przyspieszenia
a a y =e s J2 ora /a. 7 7
r
Przyspieszenie styczne określamy przez różniozkowanie modułu wektora prędkości po czasie
_ dv ar = 3F
(5)
-r
Dla t = t. = 1/2 s a = 31 om/s2.
' T
Znak "+" przy dv/dt wskazuje, że ruoh punktu jest przyspieszony, zwroty wektorów aT i r są zaś zgodne.
Przyspieszenie normalne w daDej chwili określamy ze wzoru
an = y&2 “ a r = ]/322 - 312 = 7*94 cra/s2. (6)
Promień krzywizny trajektorii w chwili t = t^ określany ze wzoru
+ v_
CD f!
t=t.
L
i
Wyszukiwarka
Podobne podstrony:
img015 12.30-13.00 - czas wolny 13.00—13.45 — obiad 13.45—14.10 — pomiar ciśnienia krwi 14.10-15.00
img015 12.30-13.00 - czas wolny 13.00—13.45 — obiad 13.45—14.10 — pomiar ciśnienia krwi 14.10-15.00
img015 12.30-13.00 - czas wolny 13.00—13.45 — obiad 13.45—14.10 — pomiar ciśnienia krwi 14.10-15.00
automatyka ii ropa M0(M4b Tl T2 14 saU.lloltt 13 ala.l0t»BI T5 M00-14d ...
9.Wyznaczenie kąta chwytu: Z zależności nacisku od czasu odczytano:*i=13,497 [s] t2=0,2 [sj13,497-36
^ sn_2012_13_ST: t2 (graw)_wtr - Mozilla Firefoxew. p h p ?q=261 &attem pt=19459 Punkty: 1/1 Dłu
^ sn_2012_13_ST: t2 (graw)_wtr - Mozilla Firefox Najtrudniejszym do rozwiązania problemem zdrowotnym
gj sn_2012_13_ST: t2 (graw)_wtr - Mozilla Firefox 10 Najpoważniejsze problemy zdro
sn_2012_13_ST: t2 (graw)_wtr - Mozilla Firefox 16A
sn_2012_13_ST: t2 (graw)_wtr - Mozilla FirefoxA https://uniwirt.pwr.wroc.pl
^ sn_2012_13_ST: t2 (graw)_wtr - Mozilla FirefoxM.A
24 (296) ‘ 32.22 31 27. 24 36 28,36 30 23 37 13 15,21.17 16 13 22.20 •5.17 1.2 5, 4,3.12,13,14
img042 Rys.13. Długość strzyków - krótkie (1). długie (9) Rys. 14. Umięśnienie - wypukłe (1). płaski
img126 1-A+ 7-ANTGND fCHG) 13- 19- 2-GND 8- Linę Out RF 14- 20- 3-BAT+ 9- Linę Out
img132 1-???? ? 13- 25-GND 2-GND 77777 7 14- 26-A+ 3- 15- 27-Booster
więcej podobnych podstron