Procedura modelowania maszyn3
; •/ .--•••
•' •
Z reguły Model Nominalny maszyny otrzymany w wyniku analizy jej konstrukcji, jest układem mechanicznym złożonym z sztywnych brył. Np. w przypadku suwnicy wyodrębniamy: koła, most, wózek, napędy, silnik, belki w zależności od szczegółowości modelu.
Musimy pamiętać, że procedura projektowania i modyfikacji konstrukcji musi uwzględniać wiele kryteriów, a w szczególności kryterium jakości.
Możliwa jest optymalizacja własności dynamicznych:
- dynamika i stabilność jazdy;
- koncentracja energii drgań;
- trwałość zmęczeniowa;
- emisja hałasu;
Oddzielnym zagadnieniem jest sterowanie i ruch programowany. Prowadzi to do konstrukcji mechatronicznych, w których maszyna ma znamiona układu inteligentnego, w którym następuje synergiczne współdziałanie podukładów:
- mechanicznego;
- elektronicznego;
- informatycznego;
Te zaś podukłady są analizowane w oparciu o zasady mechaniki, elektrotechniki, elektroniki i informatyki.
Wymagają więc wielopoziomowego systemu projektowego, w szczególności na płaszczyźnie konkretu i abstraktu.
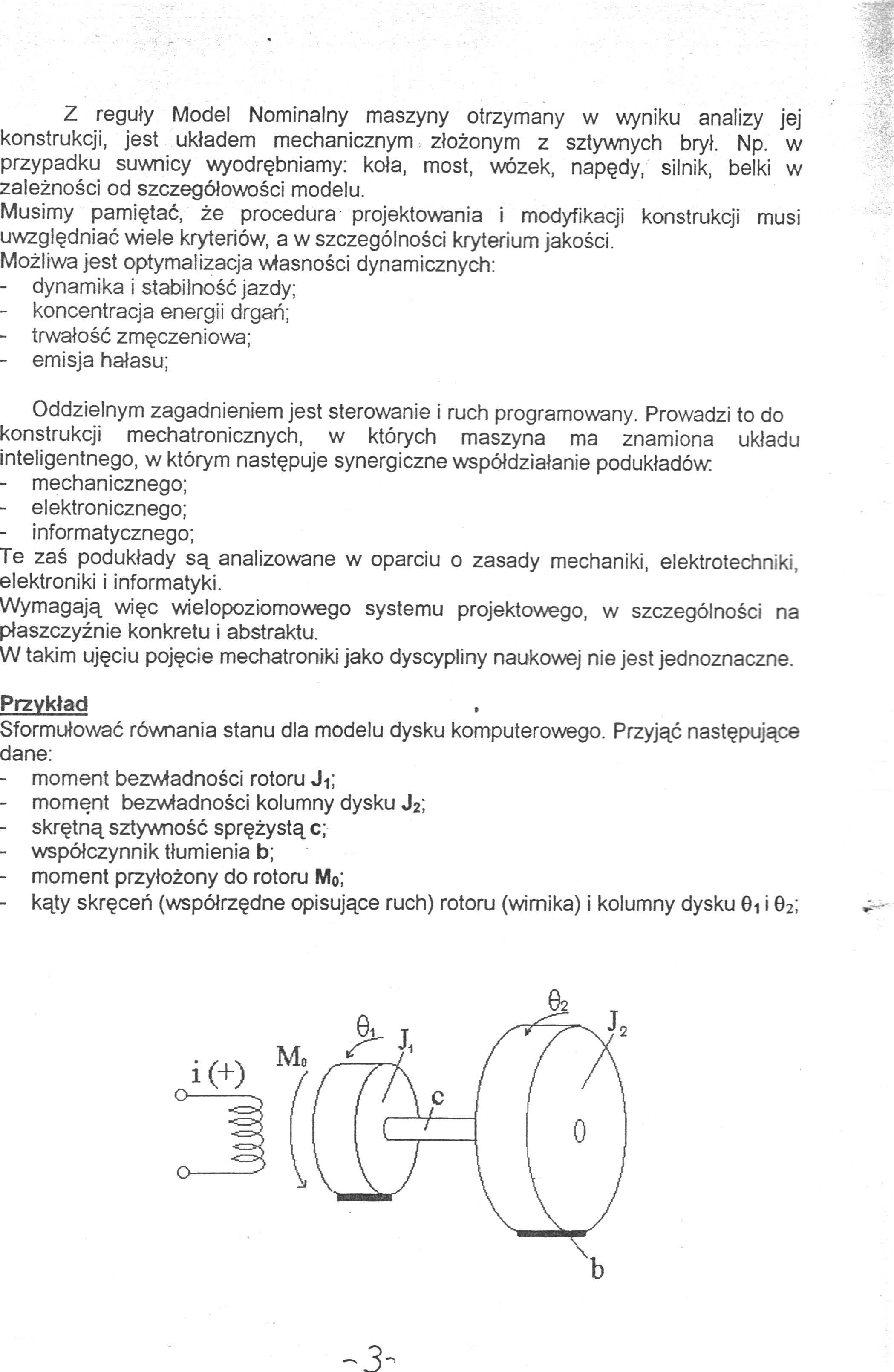
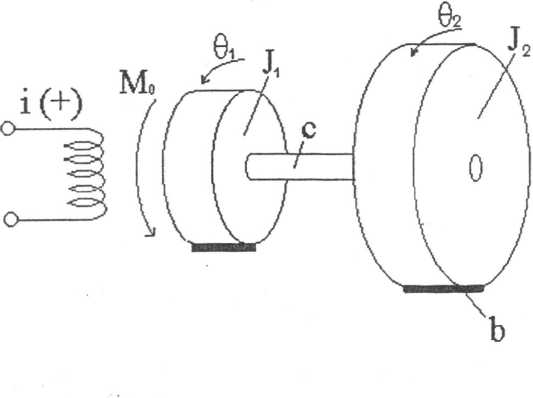
W takim ujęciu pojęcie mechatroniki jako dyscypliny naukowej nie jest jednoznaczne. Przykład
Sformułować równania stanu dla modelu dysku komputerowego. Przyjąć następujące dane:
- moment bezwładności rotoru Ji;
- moment bezwładności kolumny dysku J2;
- skrętną sztywność sprężystą c;
- współczynnik tłumienia b;
- moment przyłożony do rotom Mo;
- kąty skręceń (współrzędne opisujące ruch) rotoru (wirnika) i kolumny dysku 61 i 02;
~3
Wyszukiwarka
Podobne podstrony:
Procedura modelowania maszyn Identyfikacja to np.: ®i.pr ^i,mat.model ~ ^ gdzie: s
Procedura modelowania maszyn4 Moment Mo można opisać zależnością:H, =*,<( ) Ogólna postać równani
Zadanie 1 Przedsiębiorstwo X zgłosiło do sprzedaży maszynę i otrzymało 3 oferty. Oferta I dotyczy za
skanuj0006 (480) Przedmowa Poznanie zasad budowy maszyn oraz nabycie umiejętności ich konstruowania,
skanuj0008 (433) 1Zasady konstruowania części maszyn1.1. Zasady ogólne Konstruowanie jest procesem p
Politechnika Śląska w Gliwicach Instytut Maszyn i Urządzeń Energetycznych Zakład Podstaw Konstr
Slajd32 4 Porównanie przydatności modelu wektorowego rastrowego do modelowania obiektów rzeczywistyc
Instytut Maszyn i Urządzeń Energetycznych POLITECHNIKA SLĄSKA KONSTRUKCJE ODŚRODKOWA WIROWA PIONOWA
Elementy Budowy Maszyn i Automatyki O Taśma teflonowa - co to jest i do czego służy?
DSC00036 (29) Przyczyny przedwczetii^f#znżycia części maszyn i narzędzi CEL ĆWICZENIA Celem ćwiczeni
P1020926 Typ YCN-3000 8ASTOSOWANIK Maszyna óo cięcia termicznego YCN-3000 Jest przeznaczona Ho krzyw
1. Zasady konstruowania części maszyn1.1 Ogólne zasady konstruowania części maszyn Konstruowanie - j
CCF20091227�002 Maszyny i inne urządzenia techniczne Maszyny i inne urządzenia... wsKazanie, czy kon
więcej podobnych podstron