redukcja schematów blokowych 1
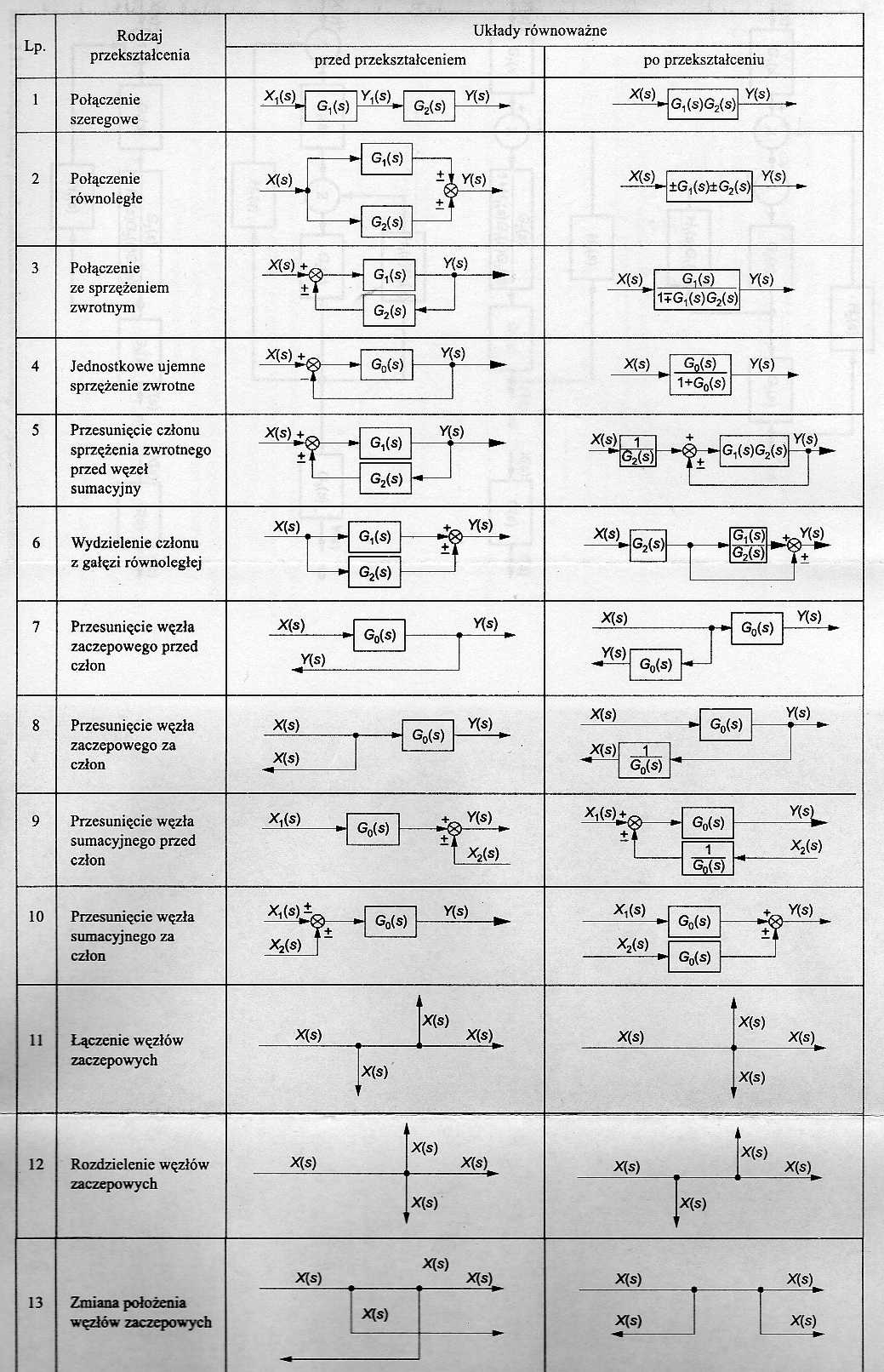
Lp.
Rodzaj
przekształcenia
Układy równoważne
przed przekształceniem
po przekształceniu
Połączenie
szeregowe
X(s)
G1(s)G2(s)
Y(s)
G,(s)
Połączenie
równoległe
X(s)
X(s)
+G,(s)±G2{s)
Y(s)
G2(s)
Połączenie ze sprzężeniem zwrotnym
G,(s)
V(s)
G2(s)
|
X(s) |
G,(s) |
y(s> | |
|
1+Gi(s)G2(s) |
Jednostkowe ujemne sprzężenie zwrotne
X(s)+,
G0(s)
Y(s)
|
X(s) _ |
G«(s) |
Y(s) |
|
1+G0(s) |
Przesunięcie członu sprzężenia zwrotnego przed węzeł sumacyjny
X(s)+,
|
®-- |
Gi(s) G2(s) |
' * — |
Y, G^jG^A |
Wydzielenie członu z gałęzi równoległej
X(s)
|
G,(S) | |
|
G2(S) | |
X(s)
G2(s)
G,(s)
G2(s)
Przesunięcie węzła zaczepowego przed człon
X(s)
y(s)
G0(s)
|
X(s) |
G0(s) |
V(S) _ | |||
|
Y(S) |
G0(s) | ||||
Przesunięcie węzła zaczepowego za człon
X(s)
X(s)
Gq(s)
y(s)
|
X(s) |
G0(s) |
Y(s) | |||
|
X(s) |
1 | ||||
|
G0(s) | |||||
Przesunięcie węzła sumacyjnego przed człon
X1(s)
X2(s)
|
x,(su |
> ^ |
G0(s) |
Y(sl |
|
"i |
r |
X2(S) | |
|
1 | |||
|
Gn(S) |
10 Przesunięcie węzła sumacyjnego za człon
x2(s)
%
y(s)
|
X,(S) _ |
G0(s) |
r+5 |
|
x2(s) ( |
i | |
|
G0(s) | ||
11
Łączenie węzłów zaczepowych
|
X(S) |
X(s) X(s) |
X(s) |
X(s) X(s)_ | |
|
X(S) |
X(s) | |||
12 Rozdzielenie węzłów zaczepowych
|
X(s) |
X(s) X(s)r |
X(s) |
X(s) X(s) | |
|
X(s) |
X(s) | |||
13 Zmiana położenia
węzłów zaczepowych
X[S)
X(s)
X(s)
X(s)
X(s)
|
X[s) |
X(s) | ||||
Wyszukiwarka
Podobne podstrony:
img023 (16) Lp. Rodzaj przekształcenia Układy równoważne przed przekształceniem po
img023 (16) Lp. Rodzaj przekształcenia Układy równoważne przed przekształceniem po
Reguly przeksztalcenia schematow blokowych 1 Tabela 3.1 Reguły przekształcenia schematów blokowych
77249 Slajd35 (101) Magistrala standardowa Rysunek przedstawia schemat blokowy komputera wyróżniając
Reguly przeksztalcania schematow blokowych Tablica 5.1 Reguły przekształcania schematów blokowych Po
redukcja schematów blokowych 2 I fc-oisj 10 Przesunięcie węzła sumacyjnego za człon X,(s)± X2(s
fizyka�2 (2) Tabl. 6.6. Współczynnik redukcyjny różnicy temperatury b!r.j [16] Lp. Rodzaj przestrze
HPIM0857 7. Układy stfosoiyc/ne Schemat blokowy układu wizyjnego robotów Rysunek 7.23 Ąmji) Rysunek
Reguly przeksztalcenia schematow blokowych 3 13 Zmiana położenia węzłów
297 (17) 296 Rozdział 5. Układy regulacji impulsowej Rys. 5.49. Zastępczy schemat blokowy układu z r
MATERIAŁ UZUPEŁNIAJĄCY DO WYKŁADU - MATERIAŁOZNAWSTWO - WBilŚ, sem. 024. UKŁADY RÓWNOWAGI 3. 1. Rodz
Zadania z Automatyki z poprzednich lat2 A4. ?ccVZadanie 2. Dokonać redukcji poniższego schematu blok
więcej podobnych podstron