Untitled 42
7.2. Opis wejściowo - wyjściowy
Opis układu jest sformułowany w postaci funkcji przejścia KO(s) (trans mitancji). Jest to iloraz wielomianów: licz i mian.
Jeśli po lewej stronie zdefiniujemy tylko dwa argumenty, to funkcja linmod określi współczynniki wielomianów licznika i mianownika funkcji przejścia
[Iicz,mian]=linmod('m0</e/',x,u,para)
gdzie licz jest wektorem wartości współczynników wielomianu w liczniku funkcji przejścia, mian jest wektorem wartości współczynników wielomianu charakterystycznego (w mianowniku funkcji przejścia).
k
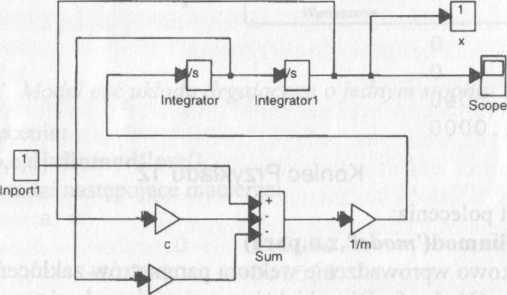
Rys. 32. Układ z jednym wejściem i jednym wyjściem
Polecenie linmod tworzy transmitancję dla układów z jednym wejściem i jednym wyjściem (SISO) oraz dla układów z jednym wejściem i wieloma wyjściami (SIMO). Jeśli układ ma p wyjść, definiuje się p transmitancji:
KG(s)j i = 1,p
mających ten sam mianownik mian. Wyjścia definiuje się za pomocą ikon bramek wyjściowych (outports).
Dla powyższego układu (Rys. 32) z jednym wejściem i jednym wyjściem polecenie:
[licz,mian]=linmod('osc')
wyprowadzi następujący komunikat:
Returning transfer function model licz =
0 0 1.0000
mian =
0.3000
1.0000,
1.0000
y(s) _ I
u(s) S2 -4 0, \s -ł 1
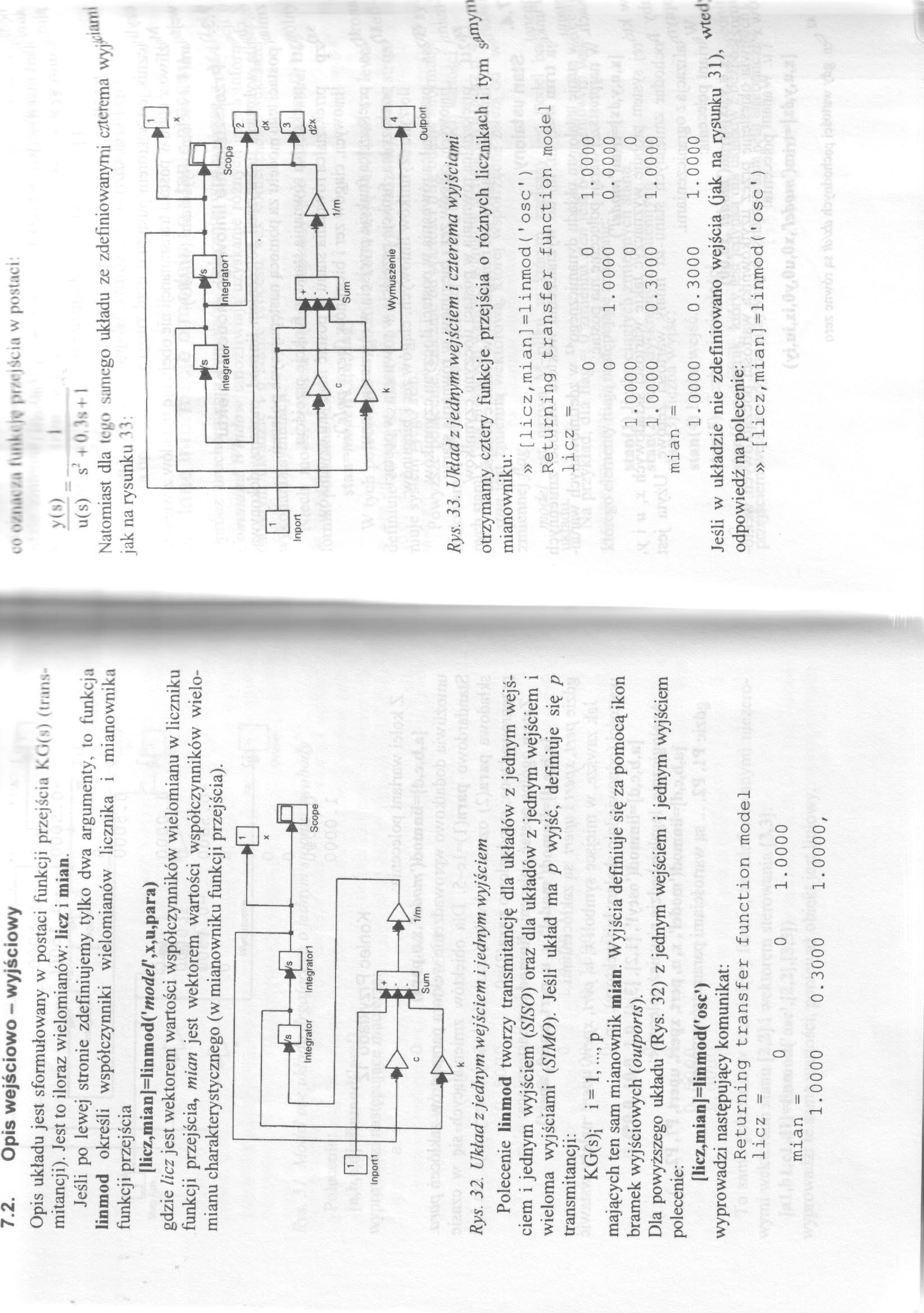
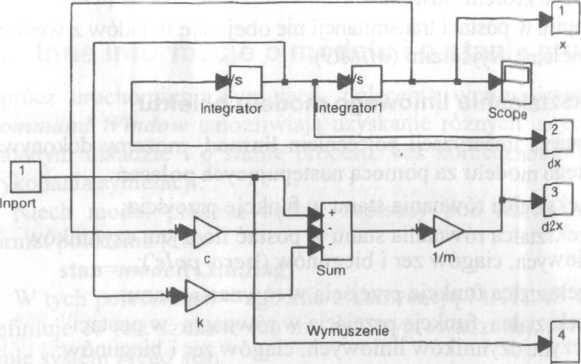
Natomiast dla tego samego układu ze zdefiniowanymi czterema wyj ^111,11 jak na rysunku 33:
Outport
Rys. 33. Układ z jednym wejściem i czterema wyjściami
otrzymamy cztery funkcje przejścia o różnych licznikach i tym s*łrn^M mianowniku:
» [licz,mian]=linmod('osc')
Returning transfer function model licz =
0
0
1.0000 1.0000 mian =
1.0000
0 1.0000
1.0000 0.0000
0 0
0.3000 1.0000
1.0000
0.3000
Jeśli w układzie nie zdefiniowano wejścia (jak na rysunku 31), vVtC odpowiedź na polecenie:
» [licz,mian] =linmod ( ' osc' )
Wyszukiwarka
Podobne podstrony:
IMGh55 „czarnoskrzynkowy”, w którym kontrolowane są wejścia i wyjścia, a nie rozpoznane jest central
OBIEKTOWA REALIZACJA OPERACJI WEJŚCIA-WYJŚCIA W języku C++ możliwa jest obiektowa realizacja operacj
Image363 WejściaSCO WyjściaRys. 4.419. Dekoder scalony 141 a) schemat funkcjonalny, b) sposób połącz
72 ROZDZIAŁ JO. PODSTAWOWE PROCEDURY WEJŚCIA I WYJŚCIA czyta tekst aż do napotkania znaku przejścia
*4. ny jest obiekt dyskretny o funkcji przejściaGoOO = z -0,4 ■■_ (z - 0,3)0? ~
MaszynaW 12 2. Maszyna EW 28 _ 2.3.1. Opis układu wejścia-wyjścia Dla rzeczywistej
Ogólny opis układu logicznegoUkład kombinacyjny o m wejściach i n wyjściach Dla pełnego opisu należy
image 3 Załącznik 1 Opis układu Układ jest selektywnym filtrem aktywnym o częstotliwości środkowej f
176 Ćwiczenia laboratoryjne z fizyki22.2. Opis układu pomiarowego Układ pomiarowy jest zbudowany w o
1. Opis układu pomiarowego Echosonda Skipper GDS101 jest bardzo popularnym urządzeniem przeznaczonym
więcej podobnych podstron