Zdj cie0172
X f \ $> VOjdtt W>vk
3±s\ > iinc^r p> scaft.v'ttww sygnału «<jsi,'wvn(jw \\0

iad 2 \Yyattcsyv trut^nunc^ obiektu opisaiK^o m$t(pując)ia równaniem różniczkowym
4— - 2v■ = 2v * ftn)V punkt ancy o współrzędnej x» = -Jt 4
Tani.» Wji i ii ijir i nary nr** ar odpowiedź skokową regulatora typu M Przyjąć W, =2, T, = 4
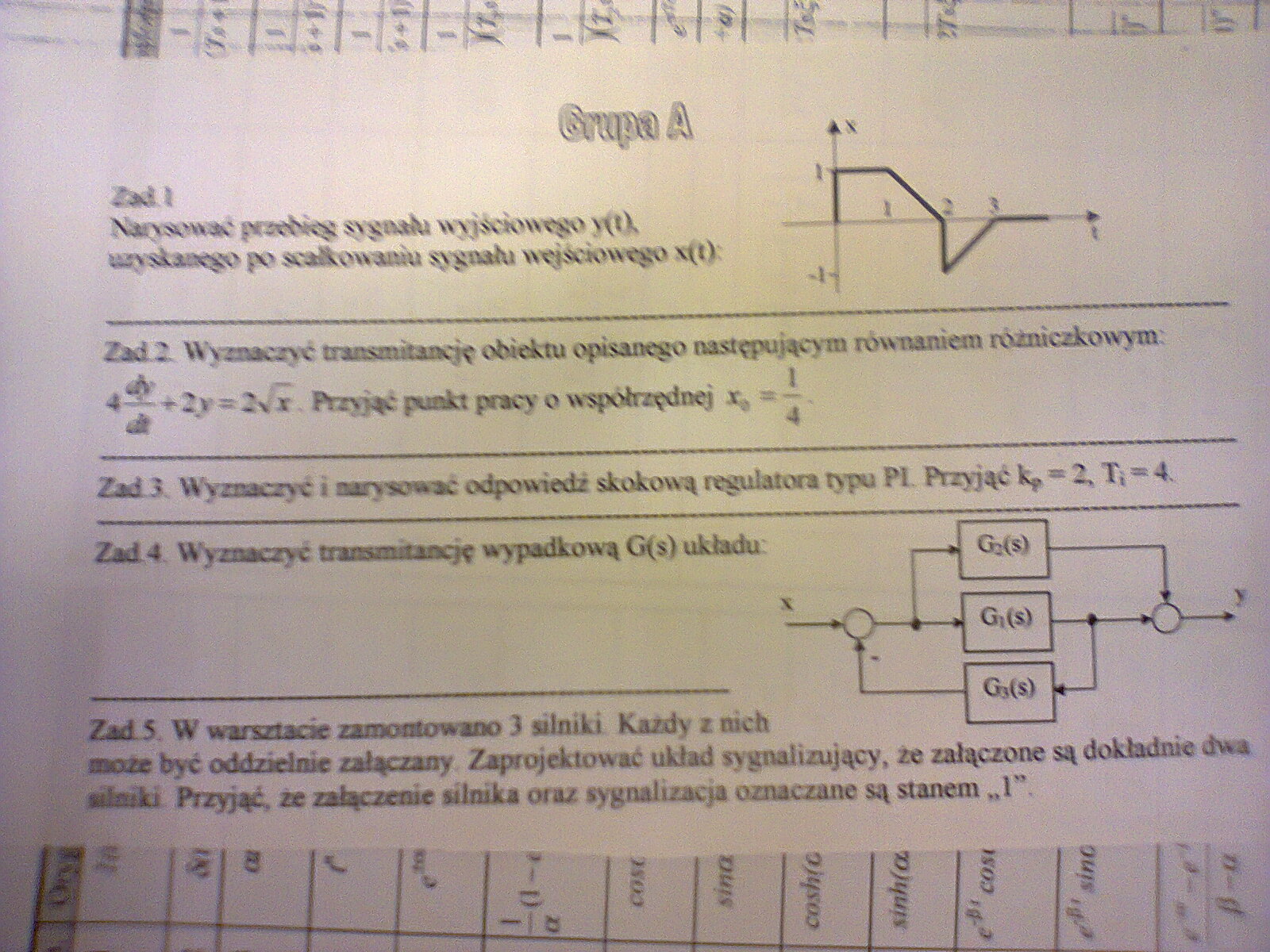
Zad4 1V< ii— ijr nHMCMqę wypadkowąG(s)układu
Gj(s>
GiW
G»(s)
ZadL 5 W warsztacie auKMtowno 3 silniki Kiidy z mcłt
WtmtB bfć oddzielnie zał»oany Zaprojektować układ sygnalizujący, ze załączone są dokładnie dwa sałatki Przyjąć, ae raŁąrrrw silnika oraz sygnalizacja oznaczane są stanem „V
Wyszukiwarka
Podobne podstrony:
Zdj cie029 y. >v.( >wi.Vk Wyrómia *«; tra, matniom ,4,^ •I pozytywne. neguywaeifmfcssiMi *Ac*p
Zdj cie0170 i i i !lot+s. Lk Li <*> k * u tu’ ti **W fi* - ick. /9t*4 lk *
Zdj cie0174 i A» * iii Nq- a. 4. >4
Zdj cie017 W analizach obejmujących bardzo okresy mówi się o zmianach a*Vu»fn^ch choroby - narodziny
Zdj cie0176 G*vf* >w . ;r..K * # ritc»i * fl O * ^ *— » olto.c ««k>nv" PCWJO pnwhrtiw. gm
81746 Zdj cie0174 i A» * iii Nq- a. 4. >4
Zdj cie0170 i i i !lot+s. Lk Li <*> k * u tu’ ti **W fi* - ick. /9t*4 lk *
23378 Zdj cie0343 /jr/ąd/nnw ry/yticni iMdycow«k<>lofnc/nviii Przy wy/jjr/iiłv ulrttofal rv/vk
Zdj cia 0092 PW «v A* •«**.**«* V Un*M*> "fi *,v,,t., ^W.^vK
F5716 rooiaw IfgMBroA* rwit*.VK «VSuxee»i mit. <BW <*> »!Wł;f--i*.»ł4-«Nm IV
fleur052 • 7>c>, . * ■ ¥> v J# V l>.f K; /. > •/: , ".Vk v *
image154 f^WwIrak 1 1 VK<J*n PO"WWiatrak 1.1 Program "Wiatrak 1.1" przeznaczony je
Image227 Vk=V? ±a-ŁŁ
Image258 Vk-Vr-a ŁŁ
więcej podobnych podstron