039
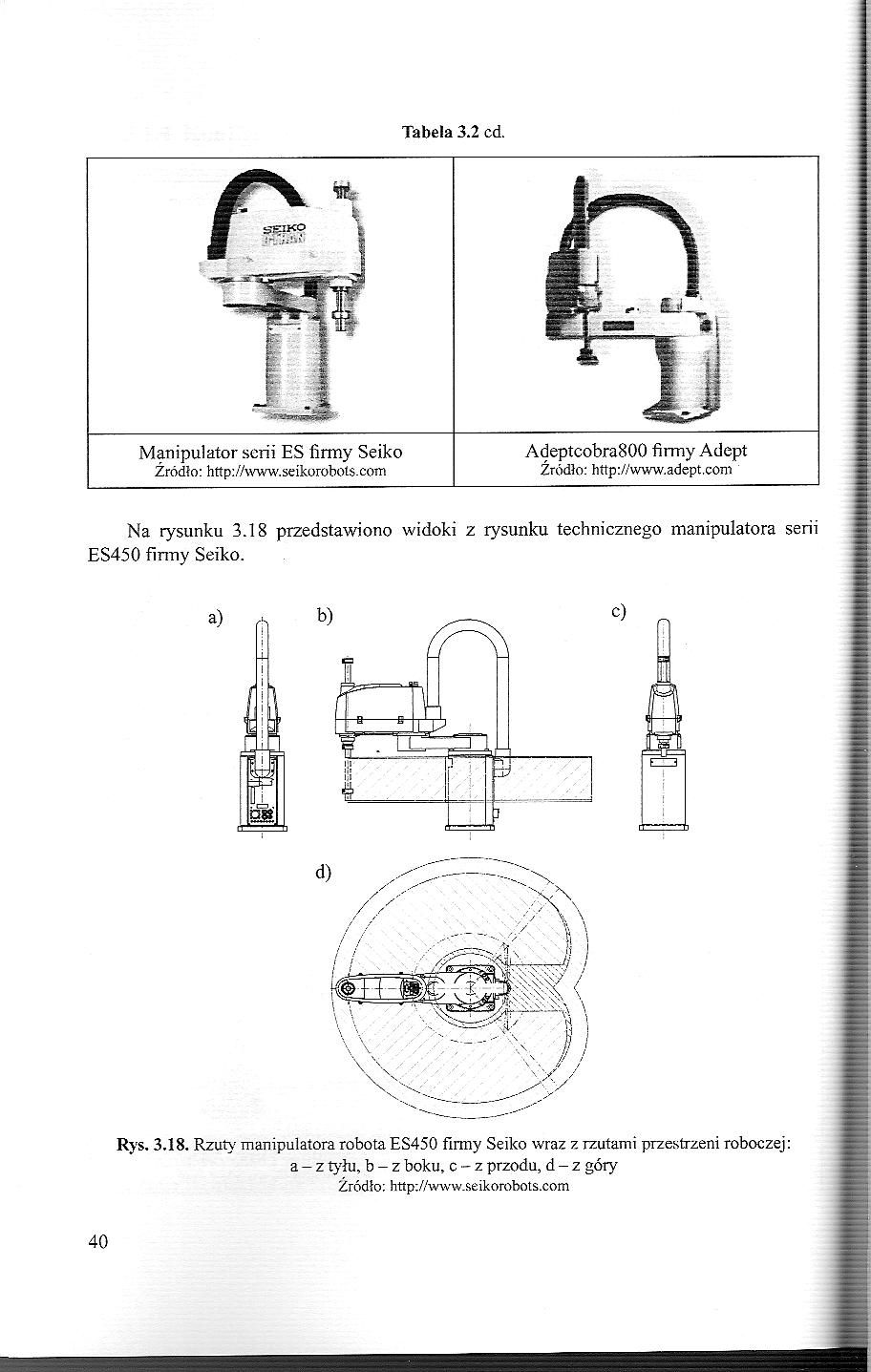
Tabela 3.2 cd.
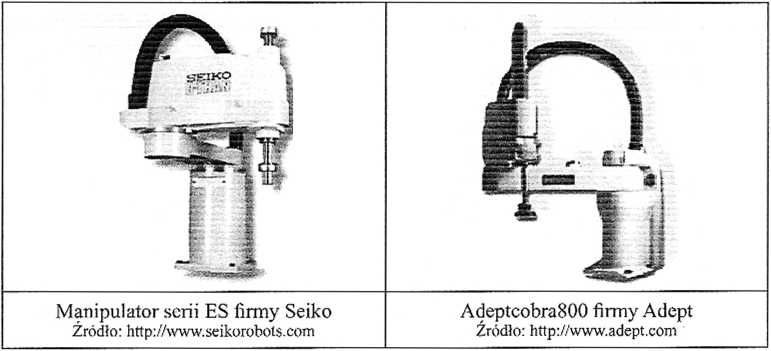
Na rysunku 3.18 przedstawiono widoki z rysunku technicznego manipulatora serii ES450 firmy Seiko.

Rys. 3.18. Rzuty’ manipulatora robota ES450 firmy Seiko wraz z rzutami przestrzeni roboczej: a-z tyłu, b - z boku, c - z przodu, d - z góry Zródto: http://www.seikorobots.com
Wyszukiwarka
Podobne podstrony:
5. PRZEDSTAWIENIE POŁĄCZEŃ EWOLWENTOWYCH (WIELOKARBOWYCH) NA RYSUNKACH TECHNICZNYCH /Y
2 (2202) spoiny PRZEDSTAWENIE POŁĄCZEŃ SPAWANYCH NA RYSUNKACH TECHNICZNYCH MASZYNOWYCH wg. PN - 89/M
Str156 (2) 156 5. PRZEDSTAWIENIE POŁĄCZEŃ EWOLWENTOWYCH (WIELOKARBOWYCH) NA RYSUNKACH TECHNICZNYCH 1
IMG00156 5. PRZEDSTAWIENIE POŁĄCZEŃ EWOLWENTOWYCH (WIELOKARBOWYCH) NA RYSUNKACH TECHNICZNYCH TY
LICZBY WYMIAROWE Na rysunkach technicznych maszynowych wymiary liniowe (długościowe) podaje się w
Przekroje brył ZASADY WYKONYWANIA PRZEKROJUBRYŁ Przekrój* na rysunkach technicznych powstają w wynik
Rys. 1. Przykład oznaczania spoiny czołowej na rysunku technicznym a) na przekroju i widoku, b) na w
PRZEKROJE (1)zasady wykonywania_ Przekroje na rysunkach technicznych powstają w wyniku przeprowadzan
DSC05672 Na rysunkach technicznych maszynowych wymiary liniowe (długościowe) podaje w w milimetrach,
Przekroje bryl ZASADY WYKONYWANIA PRZEKROJUBRYŁ Przekrój na rysunkach technicznych powstają w wyniku
więcej podobnych podstron