118
3. PODSTAWOWE URZĄDZENIA I APARATY STACJI
3. PODSTAWOWE URZĄDZENIA I APARATY STACJI
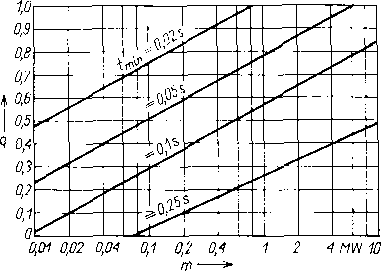
Rys. 3.32. Zależność współczynnika ą od mocy czynnej silnika na jedną parę biegunów m
prądu rozruchowego (prądu silnika przy nieruchomym wirniku) IlM oraz prądu znamionowego silnika InM.
Prąd zwarciowy początkowy silnika lub grupy silników przyłączonych bezpośrednio lub połączonych przez krótkie odcinki linii kablowych z fragmentem sieci, w której liczone są prądy zwarciowe, może być wyznaczony wg wzoru
I’kM~KclnM (3.61)
przy czym lnM — prąd znamionowy silnika lub suma prądów znamionowych wszystkich silników „pracujących” na zwarcie (zastępczy silnik równoważny). W przypadku silników wysokiego napięcia do wyznaczenia prądu udarowego silników ipM można przyjmować wartości współczynników udaru xM równe:
— 1,65 dla silników o mocy znamionowej odniesionej do jednej paTy biegunów mniejszej niż 1 MW,
— 1,75 dla silników o większej mocy.
Dla silników niskiego napięcia kmss1,3.
Prąd wyłączeniowy symetryczny silnika lub grupy silników oblicza się wg wzoru
hu = mim (3.62)
gdzie fi i q — współczynniki, które można wyznaczyć z wykresów przedstawionych na rys. 3.31 i 3.32.
Wpływ silników na warunki zwarciowe można pominąć, jeżeli suma prądów znamionowych silników jest mniejsza niż 0,01 prądu zwarciowego początkowego wyznaczonego bez udziału silników, oraz gdy są one przyłączone do sieci publicznych niskiego napięcia.
3.3. APARATY NISKIEGO NAPIĘCIA
Nie ma zasadniczych różnic dotyczących zasad działania oraz rozwiązań konstrukcyjnych aparatów wysokiego i niskiego napięcia. Natomiast odmienny sposób wykonania układów izolacyjnych powoduje, że wymiary i masy aparatów budowanych na inne napięcia znamionowe są bardzo różne.
118
Wyszukiwarka
Podobne podstrony:
3, PODSTAWOWE URZĄDZENIA I APARATY STACJI 3, PODSTAWOWE URZĄDZENIA I APARATY STACJI Rys. 3.20. Zależ
106 tif 3. PODSTAWOWE URZĄDZENIA I APARATY STACJI Rys. 3.21. Zależności współczynników VF, V„, V od
IMAG0399 (3) Podstawi aj ąc i *=*- na rys.6 uzysktycmy zależność liniową przedstawioną Sporządzając
4. ROZWIĄZANIA KONSTRUKCYJNE STACJI Rys. 4.32. Konstrukcja odbudowy stacji typu ST MC 1 — rama nośna
2tom039 2. URZĄDZENIA SPAWALNICZE 80 2. URZĄDZENIA SPAWALNICZE 80 Rys. 2.59. Zależność względnej moc
3. PODSTAWOWE URZĄDZENIA I APARATY STACJI 3. PODSTAWOWE URZĄDZENIA I APARATY STACJI Rys. 3.7. Uprosz
060 tif 3. PODSTAWOWE URZĄDZENIA I APARATY STACJI Rys. 3.3. Regulacja przekładni transformatorów pod
3. PODSTAWOWE URZĄDZENIA I APARATY STACJI Rys. 3.5. Przekrój bieguna wyłącznika małoołejowego typu 3
więcej podobnych podstron