11 (58)
‘i*®* Dfivo Moviqatcr Qararrct.«rs
1|DL--1 tfMiff! ' M a
- LEfl Mołor-/En<ooer Data
© Motor Data B Encsdcr Dota
- Lal Ccntrol/Gatng linc
B ^osioon Central [=! SowhJ Contrd d' Gjrrent Contrcl B V/F Contro)
(=3 óatmgunt d Frocess Centro!
B Funcbcns d Fj&taset d P*e*Wocks
- _Qj Techndooy
(El Sosie oowboriny dl Synerromsm d Posbomng
(El Sar Up/MDI
di Ftxed Settings B C?jck Paramoter Sstting d doanl Configi* ation dl C<-ive Sccbnęs B Potter OaFimtion © Ffw PćrarrwoyizaOon d) Pyameter L« Ctirrpsre §ł Oaęrestics - JłJ General dtajnosoes d fcitt disgriostic'-.
E) torwwi stro dagrostirs
El tracę furwton d gracfiŁ daęrosncj B cross-?etererce ccmecters
El OZK-rfiftrnrrt błnectors
d Fanks/Alarme
dl Dispiay M®«ag©s
|
| P No. j Namo |
Ind lndex text |
Paidmetot valuo |
Orat | |
|
ik^UfiS |
teonteJ* _lJ |
■ GOI BiĆoDSl |
KK75 nfMtJhb) | |
|
Smocth h(«eł) t 1 |
1001 FDS 1 0.0 |
W | ||
JH ♦«
o j 5s «*, x *•) «"
Q SrcnlacU | Smocth n(ac)|
____7 Sic 1 n(t6t/act|
P225
f2y-rtVj Sic3 ojset^act) P227 ; Sic4 n|wt/*ct)
P228 i Sic n(C-evidOcr| n (Setp Smooih) n (Ac(V Smooth) v! Sic nReg Adapt In-fłegAdaoi * |rvPeoAdBP»."; In-fieg Gani grvflegGam2 nfiegGanJadj | n-fleg Characrei I Srrooihino I Corro J nfieg I m jś Sic S©)V n-Regl “IS.c Ssl n-ficgl (Sicn-Peęl ST0P * Sic Diocp J Scalę Croop . ; Sic PTI Fcretion S^BBOT 1 F incoon Tl Bono Stop Gar
3j___jSic Eand-Sloo
^^GiyBand-Stcp BftBFiliet Freąuercy Torq|;et.nRęg|
| Filier Charach*
I Filier AdiustT B Filier Adiust2 łś^SrcTotg Uet|
1 j$rc Torq|c-nieq|
» 1001 _±jooi _U*> + 1301
BiCoDST SiCoDSI 3iCoOS I 3iCoDS 1 SiCoOS 1
3iCoOS 1 ?DS I FOS I FDS 1 FDS1
FOS t FDS 1 BICoDS I BiCóDS I BCoOS 1 SiCoDS 1 FDS1 BCoOS 1 FOS 1
F«ei I Fiterl Frtei I
BCcOST BCcOS 1
KK91 n(act)
0.0
KO FiwConn 05 KK150 n |c#,crroolh) KKT51 Kact.smooih) KO FixCorr OZ KK152 nTDenatoni 0.00 •166
KO FixConnD5 0.0 ICOO 10 0 100 1C.0 0
'2.0
50
KO FwCorw OZ BO FmBmector 0 90 F:x8inectcf0 KO FwCcnr 05 0.0
KO FaCormOSt
ao
loao
KO F#CcmQ3
00
•50 0
0 U
1
acoo ioo cco
<153 Mlreł rrPegl <0 f yCccn OZ
nrZą
mrZą
H:
Mm
jJojp^óS-
‘ |aw
Dcvce (latu* | [Ćonntclion wiłh mvic« UF
J Bus Addtssł ai
For Help, prosi FI
«»«1 Cd
^]llstal - Póinr;
| [gj OiiyeMon - (MASTERD...
UF
NQ-.il- 14:05
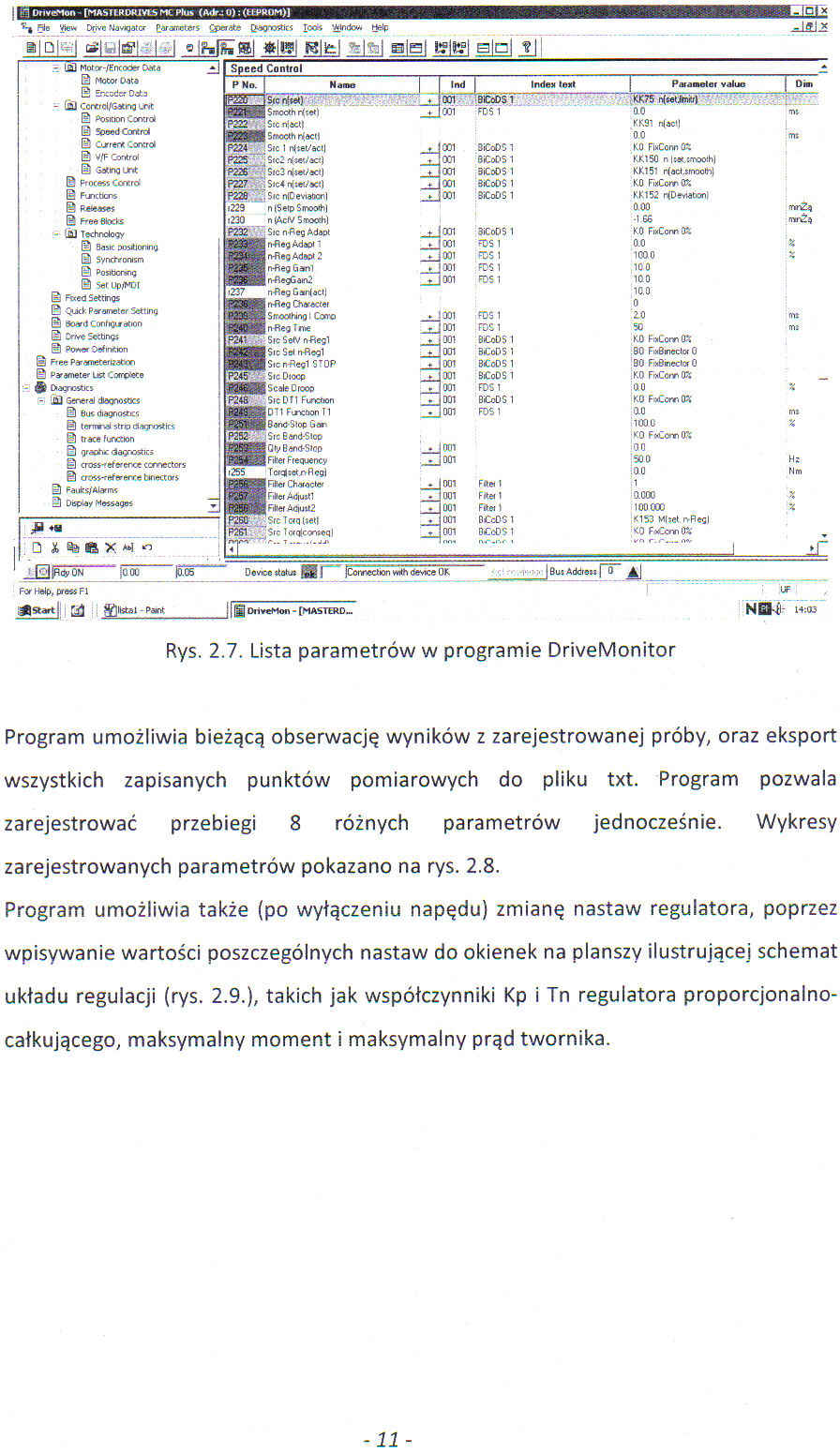
Rys. 2.7. Lista parametrów w programie DriveMonitor
Program umożliwia bieżącą obserwacją wyników z zarejestrowanej próby, oraz eksport wszystkich zapisanych punktów pomiarowych do pliku txt. Program pozwala zarejestrować przebiegi 8 różnych parametrów jednocześnie. Wykresy zarejestrowanych parametrów pokazano na rys. 2.8.
Program umożliwia także (po wyłączeniu napędu) zmianę nastaw regulatora, poprzez wpisywanie wartości poszczególnych nastaw do okienek na planszy ilustrującej schemat układu regulacji (rys. 2.9.), takich jak współczynniki Kp i Tn regulatora proporcjonalno-całkującego, maksymalny moment i maksymalny prąd twornika.
-11 -
Wyszukiwarka
Podobne podstrony:
f24 11 * Ul 1 n i» & 14* 1 5 Microsoft Excel - Bookl ^ File Edit View insert Format lools
Image010 58 11*. 58 11*. Wychowanie jako zwalczanie zdrowych instynktów życiowych U. 8tcirha*-* - —
11 I 58 ^u LUO, XXI. em uś~ oe. 20 vdmiidA^ db^de 03, p b ouu vbcin 3, Or^ jn mv 3 em uś> oe. 21
pieces VM03 j i lii i urn i mu 11 huii j i »i <h n m nihil h mmi umilili *’
Neffelin 1N Sif;■ -,va~: ... -11%,,. j*.v i>%-v>: i,
10417 z4 z7 f 4> k mitrn ępgr f x 11 i§H(i+ Ó I ~i^ix~UlxlłC t m1!1
11 (241) ś-:f? •i i "* Ti 1 ! « «»- a N : cw<*»y^v
więcej podobnych podstron