out 0078
34
© © ©
— *4 —^ —1 —^ —2 —1 —1
10 iO lio 1 10 J10 *10 10 1 1
n i -i tii-J—i r~r~i
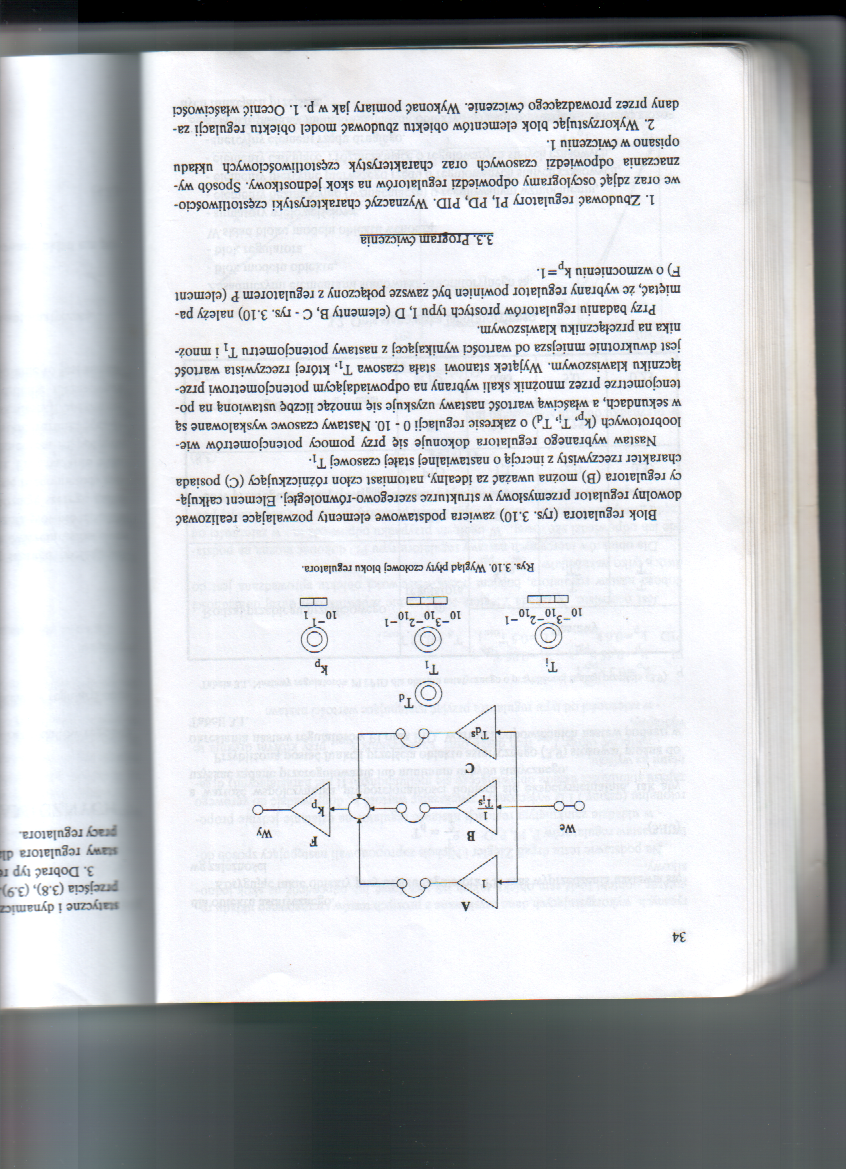
Rys. 3.10. Wygląd płyty czołowej bloku regulatora.
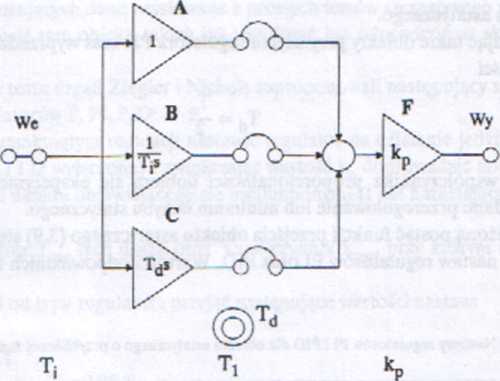
Blok regulatora (rys. 3.10) zawiera podstawowe elementy pozwalające realizować dowolny regulator przemysłowy w strukturze szeregowo-równoległej. Element całkujący regulatora (B) można uważać za idealny, natomiast człon różniczkujący (C) posiada charakter rzeczywisty z inercją o nastawialnej stałej czasowej Tv
Nastaw wybranego regulatora dokonuje się przy pomocy potencjometrów wie-loobrotowych (kp, Tit Tj) o zakresie regulacji 0 -10. Nastawy czasowe wyskalowane są w sekundach, a właściwą wartość nastawy uzyskuje się mnożąc liczbę ustawioną na potencjometrze przez mnożnik skali wybrany na odpowiadającym potencjometrowi przełączniku klawiszowym. Wyjątek stanowi stała czasowa Tlf której rzeczywista wartość jest dwukrotnie mniejsza od wartości wynikającej z nastawy potencjometru Tj i mnożnika na przełączniku klawiszowym.
Przy badaniu regulatorów prostych typu I, D (elementy B, C - rys. 3.10) należy pamiętać, żc wybrany regulator powinien być zawsze połączony z regulatorem P (element F) o wzmocnieniu kp= 1.
3,3. Program ćwiczenia
1. Zbudować regulatory PI, PD, PID. Wyznaczyć charakterystyki częstotliwościowe oraz zdjąć oscylogramy odpowiedzi regulatorów na skok jednostkowy. Sposób wyznaczania odpowiedzi czasowych oraz charakterystyk częstotliwościowych układu opisano w ćwiczeniu 1.
2. Wykorzystując blok elementów obiektu zbudować model obiektu regulacji zadany przez prowadzącego ćwiczenie. Wykonać pomiary jak w p. 1. Ocenić właściwości
Wyszukiwarka
Podobne podstrony:
out 0078 t I iS •S N i £ .§ "5 a £ £ £ ~ J ’ ES
out 0078 jpeg 156 SMtc&j/ij 3. Der Witz utul setne Beziebung zttrn Unbe-wuflte
out 0078 jpeg 156 3. Der Witz unii setne Beziehung zttm Unbe-wufiten, 1905; Gesamm
34+bauble kerstpeścl A tatfl. •ownćKynflMifM. •crt* Ur*ji ray 26. vw Ur^ł ^ 2 Out t-2S
cancer 2 C.4NCER - INSTRUCTIONS NOTĘ: ( = in I o = out i ? ? 4 1^34 • 9 ■24 • 22 .20 n ss 6 31. 3.0
PG017 34 Accommodation inn ryokan youth hostel yusu hosuteru Watch out for hotels sporting gari
2 3 (10) Sequencing Pictures Use with Look Out Kindergarten, Here I Come! on page 34. @Tł»e Educetlo
skanuj0012 (34) 37. Drogą fekalno-oralną przenoszona jest inwazja a. &
więcej podobnych podstron