skanowanie0006
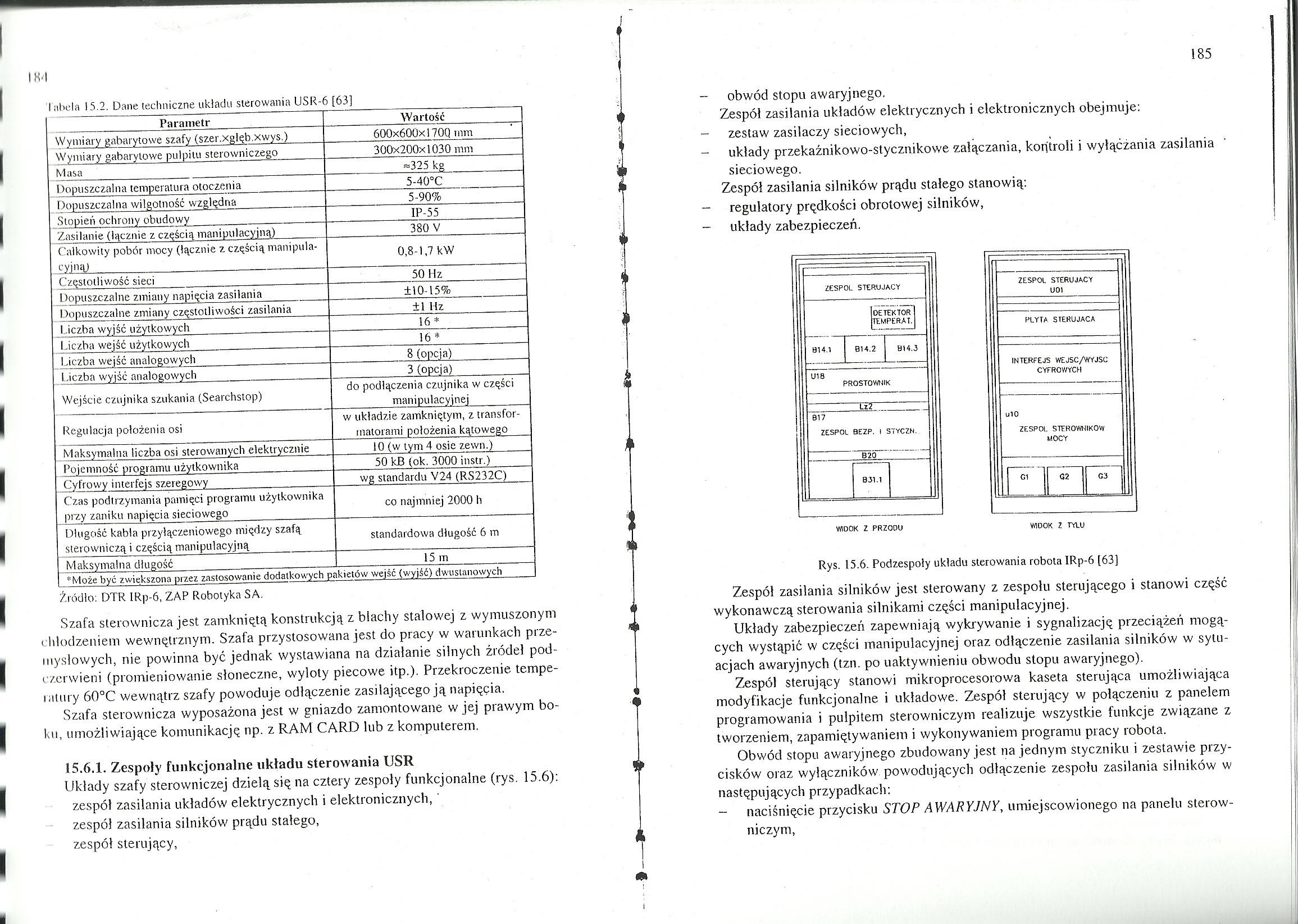
Tabela 15.2. Dane techniczne układu sterowania USR-6 [63]
|
Parametr |
Wartość |
|
Wymiary gabarytowe szafy (szer.xglęb.xwys.) |
600x600x1700 mm |
|
Wymiary gabarytowe pulpitu sterowniczego |
300x200x1030 mm |
|
Masa |
_”325 kg_ |
|
Dopuszczalna temperatura otoczenia |
5-40°C |
|
Dopuszczalna wilgotność względna |
5-90% |
|
Stopień ochrony obudowy |
IP-55 |
|
Zasilanie (łącznie z częścią manipulacyjną) |
380 V |
|
Całkowity pobór mocy (łącznie z częścią manipulacyjną) |
0,8-1,7 kW |
|
Częstotliwość sieci |
50 Hz |
|
Dopuszczalne zmiany napięcia zasilania |
±10-15% |
|
Dopuszczalne zmiany częstotliwości zasilania |
±1 Hz |
|
Liczba wyjść użytkowych |
16* |
|
Liczba wejść użytkowych |
16* |
|
Liczba wejść analogowych |
8 (opcja) |
|
Liczba wyjść analogowych |
3 (opcja) |
|
Wejście czujnika szukania (Searchstop) |
do podłączenia czujnika w części manipulacyjnej |
|
Regulacja położenia osi |
w układzie zamkniętym, z transformatorami położenia kątowego |
|
Maksymalna liczba osi sterowanych elektrycznie |
10 (w tym 4 osie zewn.) |
|
Pojemność programu użytkownika |
50 kB (ok. 3000 instr.) |
|
Cyfrowy interfejs szeregowy |
wg standardu V24 (RS232C) |
|
Czas podtrzymania pamięci programu użytkownika przy zaniku napięcia sieciowego |
co najmniej 2000 h |
|
Długość kabla przyłączeniowego między szafą sterowniczą i częścią manipulacyjną |
standardowa długość 6 m |
|
Maksymalna długość |
15 m |
|
*Może być zwiększona przez zastosowanie dodatkowych pakietów wejść (wyjść) dwustanowych | |
Źródło: DTR IRp-6, ŻAP Robotyka SA.
Szafa sterownicza jest zamkniętą konstrukcją z blachy stalowej z wymuszonym chłodzeniem wewnętrznym. Szafa przystosowana jest do pracy w warunkach przemysłowych, nie powinna być jednak wystawiana na działanie silnych źródeł podczerwieni (promieniowanie słoneczne, wyloty piecowe itp.). Przekroczenie temperatury 60°C wewnątrz szafy powoduje odłączenie zasilającego ją napięęia.
Szafa sterownicza wyposażona jest w gniazdo zamontowane w jej prawym boku, umożliwiające komunikację np. z RAM CARD łub z komputerem.
15.6.1. Zespoły funkcjonalne układu sterowania USR
Układy szafy sterowniczej dzielą się na cztery zespoły funkcjonalne (rys. 15.6): zespół zasilania układów elektrycznych i elektronicznych,' zespół zasilania silników prądu stałego, zespół sterujący,
- obwód stopu awaryjnego.
Zespół zasilania układów elektrycznych i elektronicznych obejmuje:
- zestaw zasilaczy sieciowych,
- układy przekaźnikowo-stycznikowe załączania, kontroli i wyłąćżania zasilania sieciowego.
Zespół zasilania silników prądu stałego stanowią:
- regulatory prędkości obrotowej silników,
- układy zabezpieczeń.
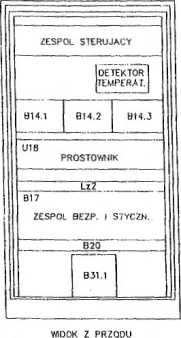
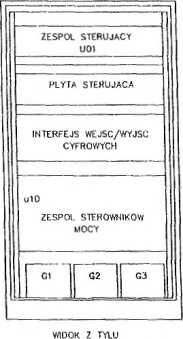
Rys. 15.6. Podzespoły układu sterowania robota IRp-6 [63]
Zespół zasilania silników jest sterowany z zespołu sterującego i stanowi część wykonawczą sterowania silnikami części manipulacyjnej.
Układy zabezpieczeń zapewniają wykrywanie i sygnalizację przeciążeń mogących wystąpić w części manipulacyjnej oraz odłączenie zasilania silników w sytuacjach awaryjnych (tzn. po uaktywnieniu obwodu stopu awaryjnego).
Zespół sterujący stanowi mikroprocesorowa kaseta sterująca umożliwiająca modyfikacje funkcjonalne i układowe. Zespół sterujący w połączeniu z panelem programowania i pulpitem sterowniczym realizuje wszystkie funkcje związane z tworzeniem, zapamiętywaniem i wykonywaniem programu pracy robota.
Obwód stopu awaryjnego zbudowany jest na jednym styczniku i zestawie przycisków oraz wyłączników powodujących odłączenie zespołu zasilania silników w następujących przypadkach:
- naciśnięcie przycisku STOP AWARYJNY, umiejscowionego na panelu sterowniczym,
Wyszukiwarka
Podobne podstrony:
MGW12 184 Tabel* 15.2. Dane techniczne układu sterowania USK-6 (63) Parametr Wartość Wymiary
skanowanie0005 (196) Załącznik 2. Dane techniczne podstawowych elementów układu 1. Przekaźniki: K1 i
smart thinking ROZRUSZNIK STYCZNIKOWYRS 1125 Tabela 13. DANE TECHNICZNE Wielkość
APARATURA GÓRNICZA ROZRUSZNIK STYCZNIKOWYRS 1132/4S Tabela 19. DANE TECHNICZNE Typ RS
smart thinking ROZRUSZNIK STYCZNIKOWYRS 1200 Tabela 21. DANE TECHNICZNE Typ RS 1200 Napięcie
ROZRUSZNIK STYCZNIKOWYRS 1230/2S Tabela 23. DANE TECHNICZNE Tabela 24. RODZAJE WYKONAN RS 1230/2S iv
smart thinking ROZRUSZNIK STYCZNIKOWYRE 22 Tabela 25. DANE TECHNICZNE Tabela 26. RODZAJE WYKONAŃ RE
APARATURA GÓRNICZA ROZRUSZNIKI STYCZNIKOWERS 1400... Tabela 27. DANE TECHNICZNE Tabela 28. PODZIAŁ
DTR-AM-G/104/06 5.2 Dane techniczne urządzeń sterowniczych i zabezpieczeniowych 5.2.1 Przekaźnik
str258 259 (2) Dane techniczne ZDALNE STEROWANIE FALAMI Zalecamy korzystanie ze zd
27299 zdjęcie0485 Harvester Timberjack 1270 - dane techniczne Uttadktorewntcąr sterowani® rsmą przeg
Tabela nr 1. Specyfikacja silnika Ml 5SP-1N [www. 2] Parametr Wartość Nominalne napięcie
więcej podobnych podstron