Sprawozdanie pneumatyka lab1

|
A A 1 | |||
|
l 1 1 M | |||
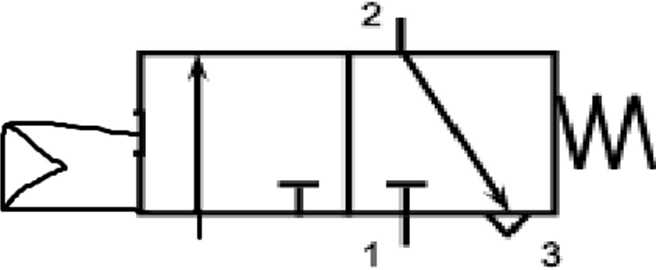
Zawór rozdzielający 3-2
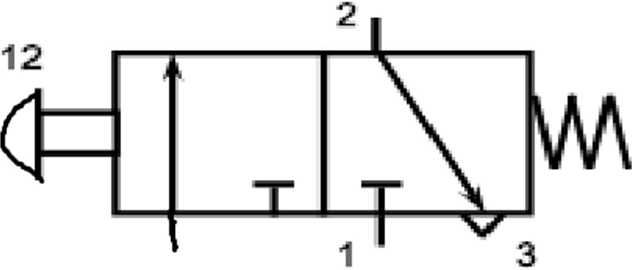

Zawór dławiąco-zwrotny jednokierunkowy, z nastawialnym dławieniem, ze swobodnym przepływem w jednym kierunku i dławionym przepływem w przeciwnym kierunku.
4. Nastawianie prędkości siłownika jednostronnego działania

SI b) SI
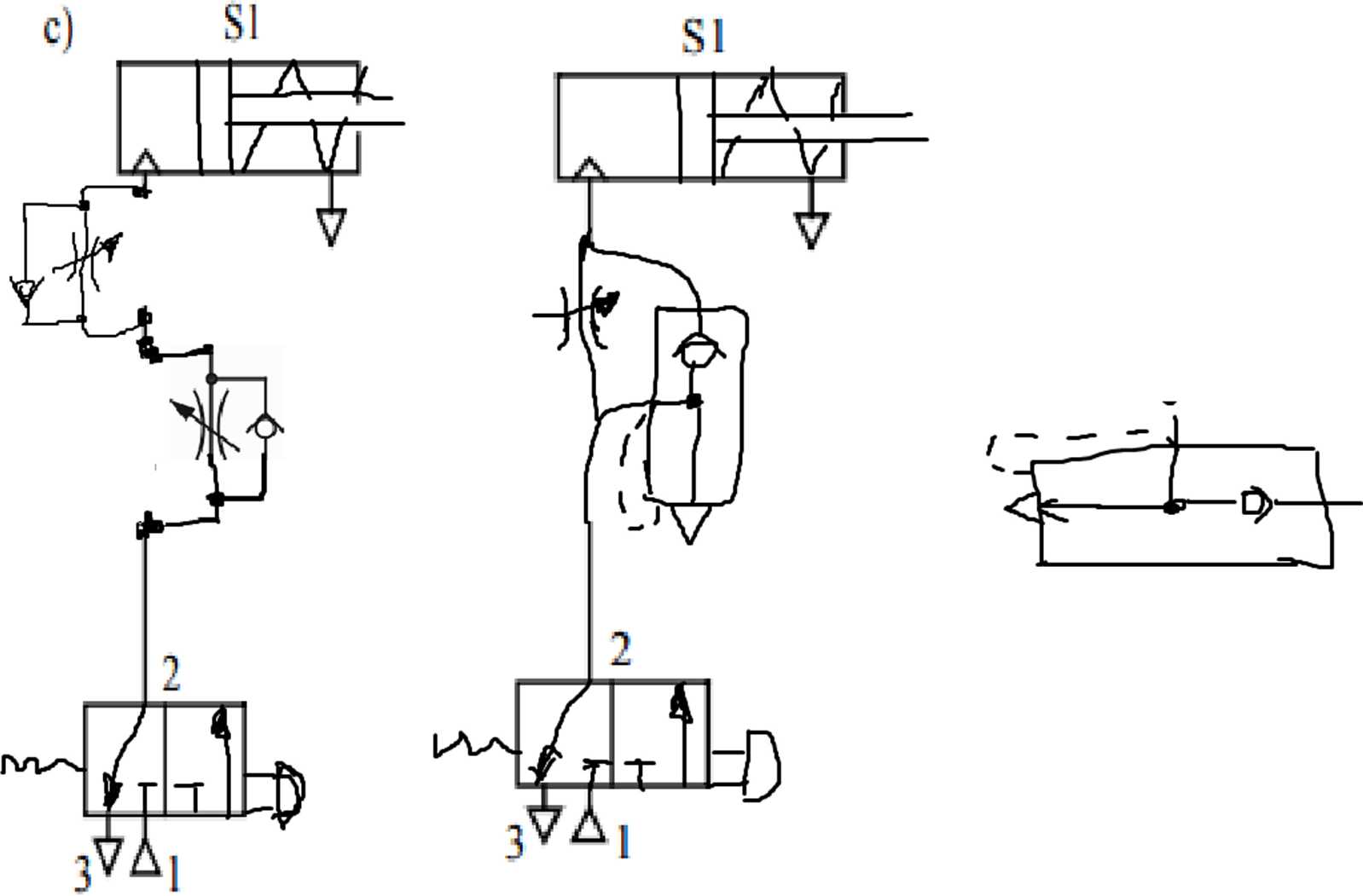
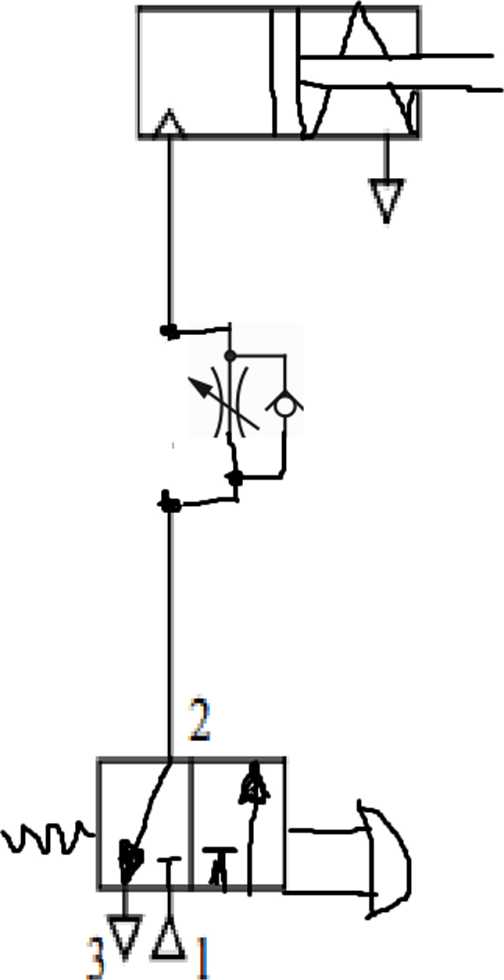
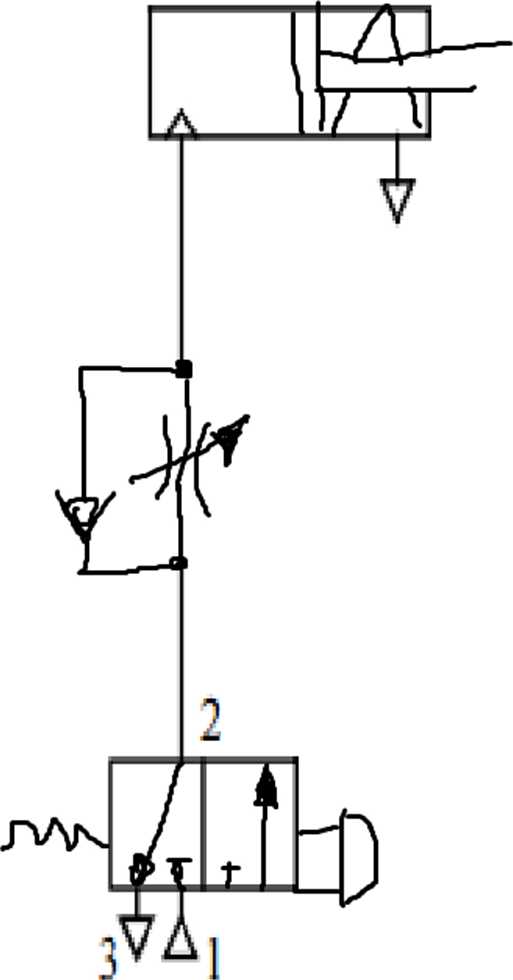
- Zapewnić możliwość nastawiania prędkości wysuwu siłownika jednostronnego działania wykorzystując zawór dławiąco-zwrotny. Po zmontowaniu układu uzupełnić schemat z rysunku I .2a.
- Zapewnić możliwość nastawiania prędkości powrotu siłownika jednostronnego działania wykorzystując zawór dławiąco-zwrotny. Po zmontowaniu układu uzupełnić schemat z rysunku I.2b.
- Zapewnić możliwość nastawiania prędkości siłownika jednostronnego działania w obydwu kierunkach. Po zmontowaniu układu uzupełnić schemat z rysunku 1.2c i 1.3a.
- Zapewnić możliwość szybkiego powrotu siłownika |ednostronnego działania wykorzystując zawór szybkiego spustu. Po zmontowaniu układu uzupełnić schemat z rysunku 3b.
Rys. 1.2. Sposoby sterowania prędkością siłownika jednostronnego działania
A
jednostronnego działania - suw roboczy odbywa się tylko w jednym kierunku
Siłowniki jednostronnego działania wymagają wymuszenia powrotu tłoka do pozycji
wyjściowej oraz usunięcia z komory roboczej powietrza (zmniejszenie ciśnienia). Może to być zrealizowane za pomocą sprężyny ściskanej w czasie suwu roboczego,
która gdy siłownik pozostaje w spoczynku, zapewnia powrót tłoka. Niekiedy ciężar tłoczyska, urządzenia roboczego lub zewnętrznego obciążenia wystarcza do wykonania tej pracy.
Zasięg suwu roboczego siłownika jest limitowany długością tłoczyska. Ze względu na niebezpieczeństwo wyboczenia długość ta jest ograniczona.
Szybkość wysuwu (wsuwu) można regulować poprzez wolniejsze doprowadzenie (odprowadzenie) powietrza do komory roboczej siłownika.

Sterowanie bezpośrednie dotyczy zwykle małych wielkości zaworów rozdzielających i odcinających sterowanych elektromagnetycznie. Wynika to z konieczności stosowania elektromagnesów o dużych mocach cewek niezbędnych do wytworzenia niezbędnej siły potrzebnej do pokonania oporów ruchu i ciśnienia elementu sterującego.
Zaletą sterowania bezpośredniego jest szybkie działanie zaworów oraz brak kontaktu medium roboczego z wewnętrznymi elementami elektromagnesów, prostota konstrukcji i brak konieczności wykonywania kanałów odpowietrzających.
Sterowanie pośrednie zaworami rozdzielającymi realizowane jest z wykorzystaniem dodatkowego zaworu pomocniczego nazywanego często „pilotem" (sterowanego w sposób bezpośredni), który to po przesterowaniu sygnałem elektrycznym lub ciśnieniem obcym, podaje ciśnienie czynnika roboczego na powierzchnię czynną suwaka zaworu podstawowego, powodując jego przemieszczenie. Zwykle stosowane jest również dodatkowe sterowanie mechaniczne zaworem pomocniczym pozwalające na przesterowanie zaworu bez podawania sygnału elektrycznego. Zaletą sterowania pośredniego jest możliwość sterowania zaworami o dużych wielkościach natężenia przepływu z wykorzystaniem niewielkich mocy elektromagnesów.
3.
Do nastawianai prędkości dla siłowników jednostronnego działania stosuje się zawory dłąwiąco zwrotne. Zawory dławiąco zwrotne mają na celu zmniejszenie
przekroju przepływu czynnika roboczego w jednym kierunku, przekrój przepływu można regulować poprzez regulację wbudowaną w zawór, odpowitrznik chwilowy
Do zaworu dodaje się odpowietrznika ustawionego w ospowiednią stronę, w zależności od tego czy chcemy żeby siłownik się wolniej wysuwał czy wsuwał, bądź
ukłądu z dwóch dławików połączonych szeregowo o odpowietrznikach chwilowych zamontowanych w przeciwne strony, gdy chcemy regulować prędkość wsuwu jak i wysuwu.
Wyszukiwarka
Podobne podstrony:
OMiUP t2 Gorski$8 zawór dławiąco-zwrotny (jednokierunkowy) 22.2. Regulator przepływu (symbole szczeg
62254 OMiUP t2 Gorski$8 zawór dławiąco-zwrotny (jednokierunkowy) 22.2. Regulator przepływu (symbole
OMiUP t2 Gorski$8 zawór dławiąco-zwrotny (jednokierunkowy) 22.2. Regulator przepływu (symbole szczeg
P1110725 Rys.16 Zawór dławiący Zawór zwrotny ZAWÓR DŁAWIĄCO-ZWROTNY porusza się z pełną prędkością.
IMAG0273 (Kopiowanie) Mai silnik hydrauliczny siłownik zawór dławiący- zawór zwrotny rozdzielacz zaw
IMAG0274 (Kopiowanie) silnik hydrauliczny > — siłownik zawór dławiący zawór zwrotny b) rozdzielac
siłownik zawór dławiący zawór zwrotny zbiornik silnik hydrauliczny rozdzielacz zawór
□ Przepływ zamknięty w rozdzielaczu Zawór dławiący o oporze lapkościowym-n a stawi a
Zadanie 21. Na schemacie pneumatycznego układu napędowego zawór dławiący jest oznaczony
79 (12) b) schemat rurociągów instalacji gaśniczej statku ro-ro: I bulla z CO 2 pneumatycznie otwier
/ 50, ZESTAWY DWUKOLUMNOWE O ROŻNYCH CIŚNIENIACH 257 ^ Zawór f dławiący Wf RYS,
RECENZJE I SPRAWOZDANIA 163 Pracę zamyka rozdział VI „Relatywizm etyczny i metaetyczny”, w którym Ja
czasowniki złozone rozdzielnie niemiecki polski zwrotny: smnu. s»y -------------CZASOWNIKI złożone r
SPRAWOZDANIE Z DOŚWIADCZENIA Tytuł doświadczenia: Rozdział tuszu pisaków na składniki metodą
więcej podobnych podstron