Image 014
W6-7
|
‘I |
2 |
3 |
6 |
12 |
|
D |
887-10"' |
149-10‘4 |
8,57-10'4 |
0,52ff-10'4 |
|
a |
1,316 |
1,118 |
1,0269 |
1,006 |
a współczynnik kjest wyznaczony z równania:
v =
M
cos a .
d 0
Zakładając dopuszczalną wartość współczynnika kształtu prądu przy znamionowym obciążeniu silnika (zwykle przyjmuje się kj<l,04), z zależności (3.105) można wyliczyć wymaganą wartość indukcyjności obwodu wirnika Lg. Jeżeli jest ona większa od indukcyjności silnika LM do obwodu wirnika należy włączyć indukcyjność dodatkową (dławik wygładzający).
•i *•
3.7.5, Zalety i wady napędu z silniki.em obcowzbudnym zasiląnym z prostownika tyrystorowego
Podstawowymi zaletami napędów z silnikiem obcowzbudnym zasilanym z prostownika tyrystorowego są:
- wysoka sprawność napędu wynikająca z wysokiej sprawności przekształtnika tyrystorowego,
- możliwość płynnego sterowania prędkości silnika w szerokim zakresie jej zmian,
- dobre właściwości dynamiczne napędu,
- możliwość hamowania ze zwrotem energii do sieci zasilającej,
- możliwość pracy rewersji momentu i prędkości w układach nawrotnych.
Do wad tego typu układu napędowego zaliczamy:
- pobór z sieci zasilającej prądu niesinusoidalnego, zawierającego oprócz harmonicznej podstawowej również wyższe harmoniczne (inaczej mówiąc prostownik tyrystorowy generuje wyższe harmoniczne prądu w sieci zasilającej). Wyższe harmoniczne prądu przepływając przez elementy reaktancyjne sieci zasilającej wywołują na nich spadki napięci, co powoduje odkształcenie napięcia sieci zasilającej. Może to mieć niekorzystny wpływ na pracę samego prostownika oraz innych odbiorników podłączonych do sieci. Dla ograniczenia tego zjawiska stosuje się specjalne filtry wyższych harmonicznych (elementy LC wykorzystujące zjawisko rezonansu szeregowego).
- stosunkowo niski współczynnik mocy, szczególnie przy głębokim wysterowaniu prostownika, tzn. gdy kąt opóźnienia włączenia tyrystorów a jest bliski 90°. Zachodzi bowiem przybliżona równość kąta opóźnienia włączenia a z kątem przesunięcia fazowego (pi pierwszej harmonicznej prądu sieci zasilającej względem napięcia czyli
(3.107)
cos^ą = cos a .
4. AUTOMATYCZNA REGULACJA NAPĘDÓW ELEKTRYCZNYCH
Zadaniem układu automatycznej regulacji w układach napędowych jest spełnienie następujących zasadniczych celów:
- wielkość regulowana powinna dostatecznie dokładnie odwzorowywać przebieg wielkości sterującej,
- wpływ zakłóceń na przebieg wielkości regulowanej powinien być jak najmniejszy.
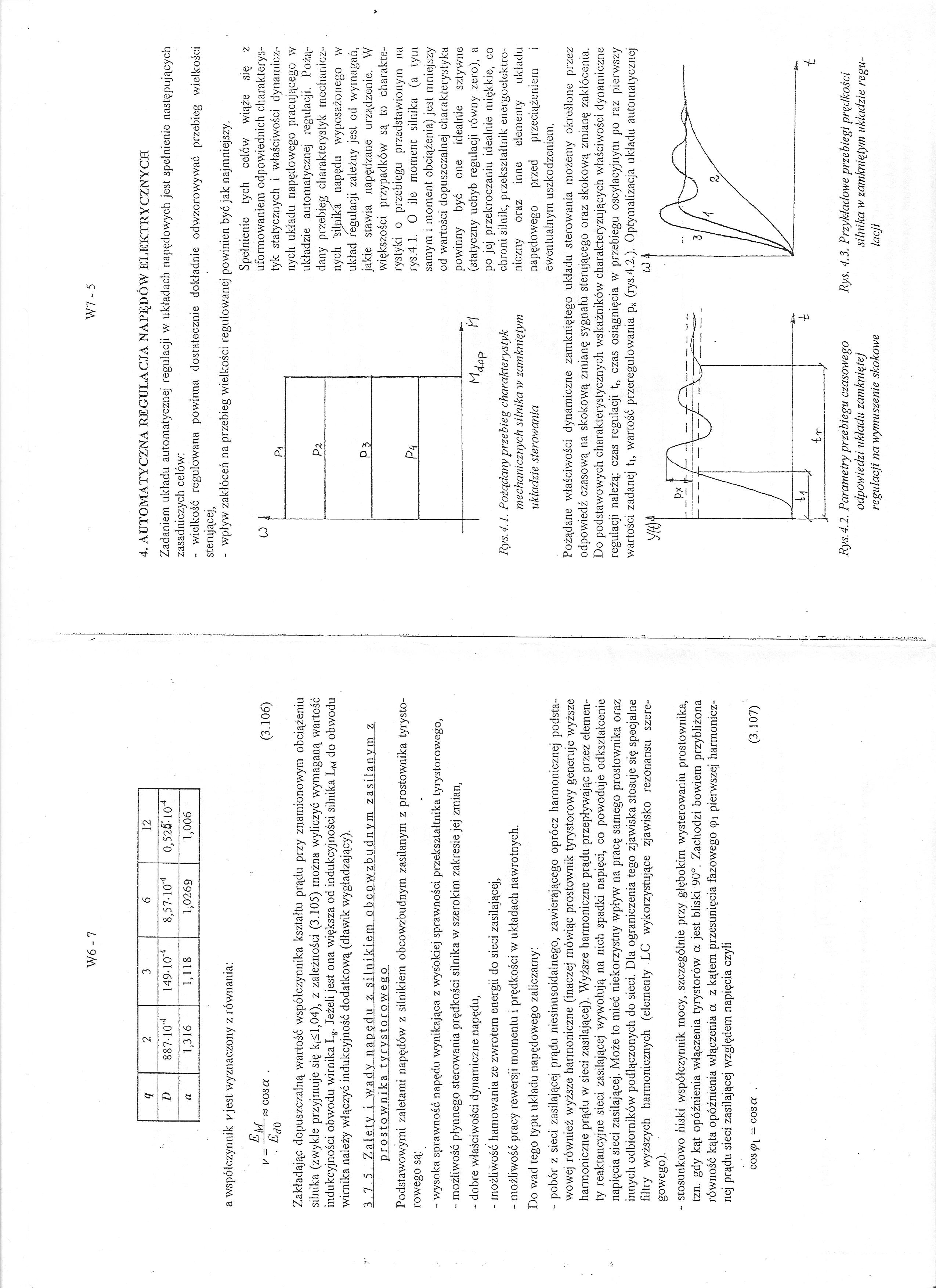
Rys. 4.1. Pożądany przebieg charakterystyk
mechanicznych silnika w zamkniętym układzie sterowania
Spełnienie tych celów wiąże się z uformowaniem odpowiednich charakterystyk statycznych i właściwości dynamicznych układu napędowego pracującego w układzie automatycznej regulacji. Pożądany przebieg charakterystyk mechanicznych ‘sjłnika napędu wyposażonego w układ regulacji zależny jest od wymagań, jakie stawia napędzane urządzenie. W większości przypadków są to charakterystyki o przebiegu przedstawionym na rys.4.1. O ile moment silnika (a tym samym i moment obciążenia) jest mniejszy od wartości dopuszczalnej charakterystyka powinny być one idealnie sztywne (statyczny uchyb regulacji równy zero), a po jej przekroczariiu idealnie miękkie, co chroni silnik, przekształtnik energoelektro-niczriy oraz inne elementy układu napędowego przed przeciążeniem i e wen tu a 1 n y m u s z ko d ze n i e i n.
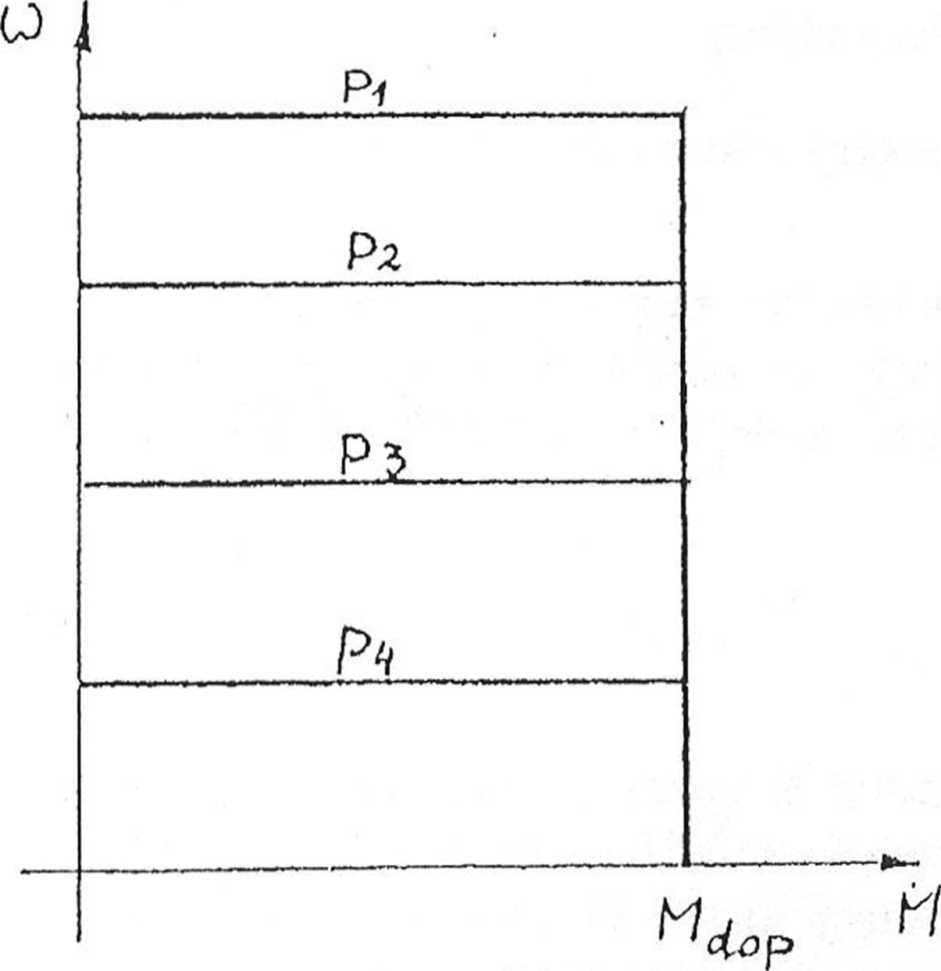
Pożądane właściwości dynamiczne zamkniętego układu sterowania możemy określone przez odpowiedź czasową na skokową zmianę sygnału sterującego oraz skokową zmianę zakłócenia. Do podstawowych charakterystycznych wskaźników charakteryzujących właściwości dynamiczne regulacji należą: czas regulacji tr, czas osiągnięcia w przebiegu oscylacyjnym po raz pierwszy wartości zadanej tj, wartość przeregulowania p* (rys.4.2.). Optymalizacja układu automatycznej
Rys. 4.2. Parametry przebiegu czasowego odpowiedzi układu zamkniętej regulacji na wymuszenie skokowe
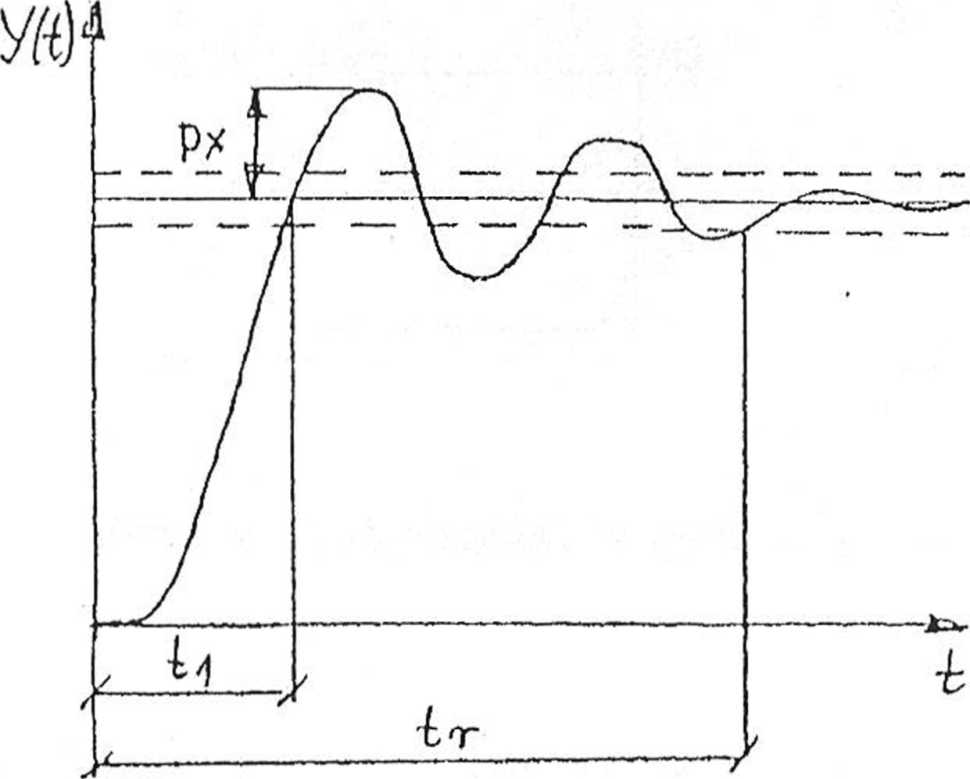
Rys. 4.3. Przykładowe przebiegi prędkości
silnika w zamkniętym układzie regulacji
Wyszukiwarka
Podobne podstrony:
image 014 14 Parametry anten natężenia pola. Jeśli natomiast w polu promieniowania występują obie sk
Image(014) 3 Enzymy atloMcnczr* charikterszują s.e poiiuUniero ^ Centrum
Image 014 WYKŁAD 12 8. UKŁADY NAPĘDOWE Z SILNIKAMI SYNCHRONICZNYMI 8.1. Konstrukcja i podstawow
est4 17) Morley S., Word and Image in Modern Art, (wydanie dowolne), rozdz.: Grand Bazar, Merah
f15 2 Netscape - [GIF image 170x170 pixels] File Edit View Go Bookmarks Options Directory Window
f15 2 Netscape - [GIF image 170x170 pixels] File Edit View Go Bookmarks Options Directory Window
f23 3 Insert Objęci Object Type: OK (* CreateNew Create from File Bitmap Image Blue Sky Software Sma
F4 1 Image H0E3 File Edii View Go Bookmarks Options Directory Window
F4 4 B 0E3 D A Memory Image - Microsoft Internet Exploiei File Edit View Go Fąvorites Help o g © 0
F4 5 H0E3 s Netscape • [Rotating An Image] File Edit View Go Bookmarks Options Directory Window
Fig3 Block-statue of the lii; priest Hor. Front view Nakhtef-muti, presenting the divine image of Pt
float2p paragraph margin paragraph bordor image margin paragraph paddlng S5OTe sąT!^4e text n the ii
float2p paragraph margin paragraph bordor image margin paragraph paddlng S^e sąnn^Je Jext n the iirs
floatclear paragraph margin image margin
floatclear paragraph margin image margin g<OTe_samg)e.Jexl m the lirst paragraph. It has a ‘oalrc
więcej podobnych podstron