Image 014
WYKŁAD 12 8. UKŁADY NAPĘDOWE Z SILNIKAMI SYNCHRONICZNYMI 8.1. Konstrukcja i podstawowe właściwości maszyn synchronicznych
W stojanie silnika synchronicznego wykonanym z wykrojów blach w celu zmniejszenia strat w stali znajduje się trójfazowe uzwojenie połączone w gwiazdę lub trójkąt. Drugą częścią silnika jest magneśnica (wirnik), wzbudzana prądem stałym doprowadzanym poprzez pierścienie ślizgowe. Małe maszyny mogą być wyposażone w magnesy trwałe. Maszyna synchroniczne są budowane z wirnikiem iawnobiegunowym (z biegunami wydatnymi) lub z biegunami utajonymi (o wirniku cylindrycznym). Silniki synchroniczne mocą pracować zarówno z pojemnościowym jak i indukcyjnym współczynnikiem mocy. Na jego wartość można wpływać poprzez zmianę prądu wzbudzenia. Prędkość obrotowa silnika synchronicznego jest niezależna od obciążenia i równa prędkości synchronicznej:

Schemat zastępczy i wykres wskazowy maszyny o biegunach utajonych, przy pominięciu rezystancji stojana, przedstawiono na rys. 8.1. Staimień wzbudzenia Of indukuje w uzwojeniach stojana sem Ef. Fazowe napięcie zasilania U3f oraz sem Ef tworzą między sobą kąt obciążenia 5. Moment elektromagnetyczny maszyny z biegunami utajonymi przy pominięciu strat obliczamy na podstawie mocy elektrycznej:
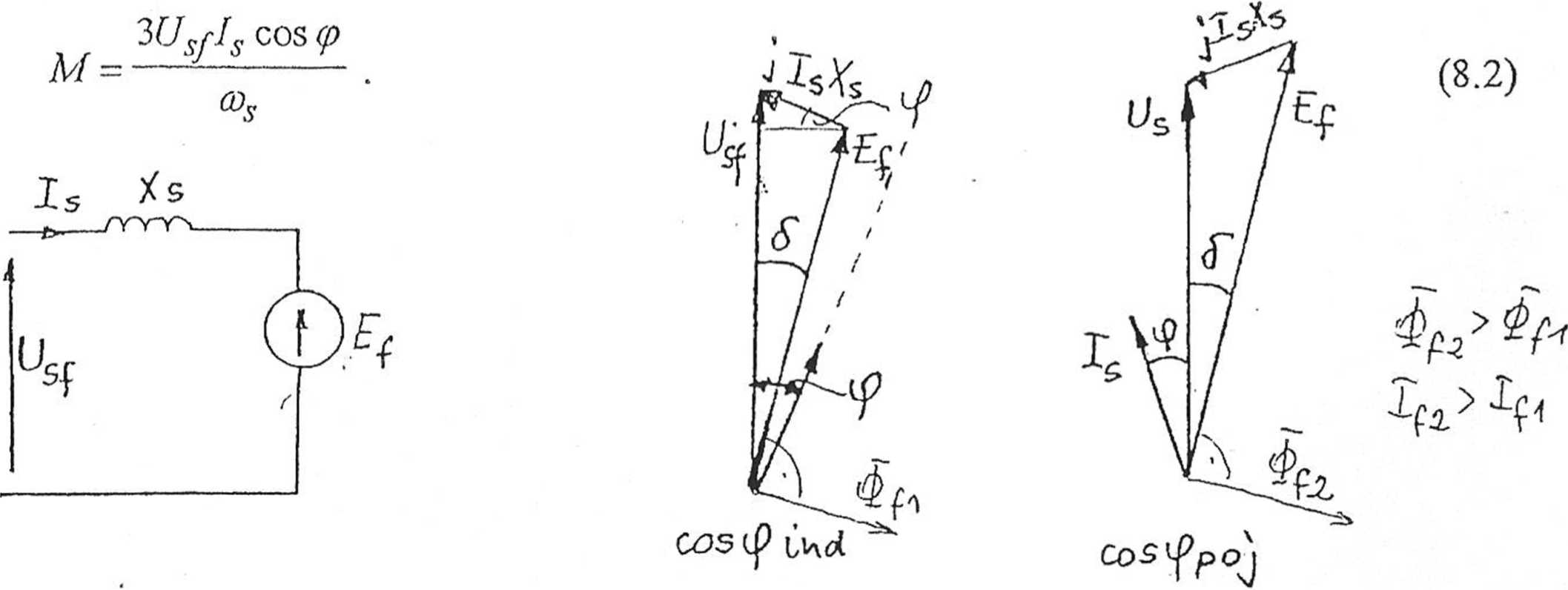
Rys. 8. L Schemat zastępczy i wykres wskazowy maszyny o biegunach utajonych
Z wykresu wskazowego przedstawionego na rys. 8.1. otrzymuje się:
E
EfSinS = 1SXS cos ę => / cos ę = -j- sin 5
X.
a po podstawieniu tej zależności do równania (8.2):
*
(8.4)
3 UsfE r
M = -.....-■/ sin<? .
<»SXS
Znamionowa wartość prądu gałęzi magnesowania silnika Imn jest w przybliżeniu równa prądowi biegu jałowego silnika, lub można ją wyznaczyć z zależności (6.27) podstawiając I, = IsN, = sn. Przykładowy przebieg prądu stojana od częstotliwości wirnika przedstawiono na rys. 6.7. Zauważmy, że jest to charakterystyka jednoznaczna, prąd stojana jest bowiem niezależny od częstotliwości stojana. Ponieważ do określenia prądu zasilania silnika konieczna jest informacja o poślizgu, wymuszenie prądowe można stosować tylko w zamkniętych układach sterowania.
Rys. 6.5. Przykładowy przebieg charakterystyki h =f(fj dla </>=
W9 - 8
6.2.2, Zmiana liczby par biegunów silnika
Przez zmianę liczby par biegunów silnika asynchronicznego uzyskuje się skokowe sterowanie jego prędkości obrotowej. Silniki o specjalnej konstrukcji, z przełączalną liczbą par biegunów wykonuje się jako dwubiegowe (o dwóch liczbach par biegunów) lub widobiegowe;.: W przypadku silników dwubiegowych o stosunku liczby par biegunów 1:2 lub rządzie 1:1,5 wykonuje się jedno uzwojenie stojana przełączalne na dwie różne liczby biegunów. Silniki 3 i 4 biegowe posiadają w stojanie dwa uzwojenia. Wirnik zwarty nadaje się do silnika o każdej licznie par biegunów.
W zależności od sposobu wykonania przy różnej liczbie par biegunów silniki mogą zachowywać w przybliżeniu stała wartość momentu lub stałą wartość mocy. Przykładowee charakterystyki mechaniczne silników wielobiegowych przedstawiono na rys. 6.6. Trójfazowe silniki asynchroniczne dwubiegowe są często stosowane w napędach dźwigów osobowych i w napędach
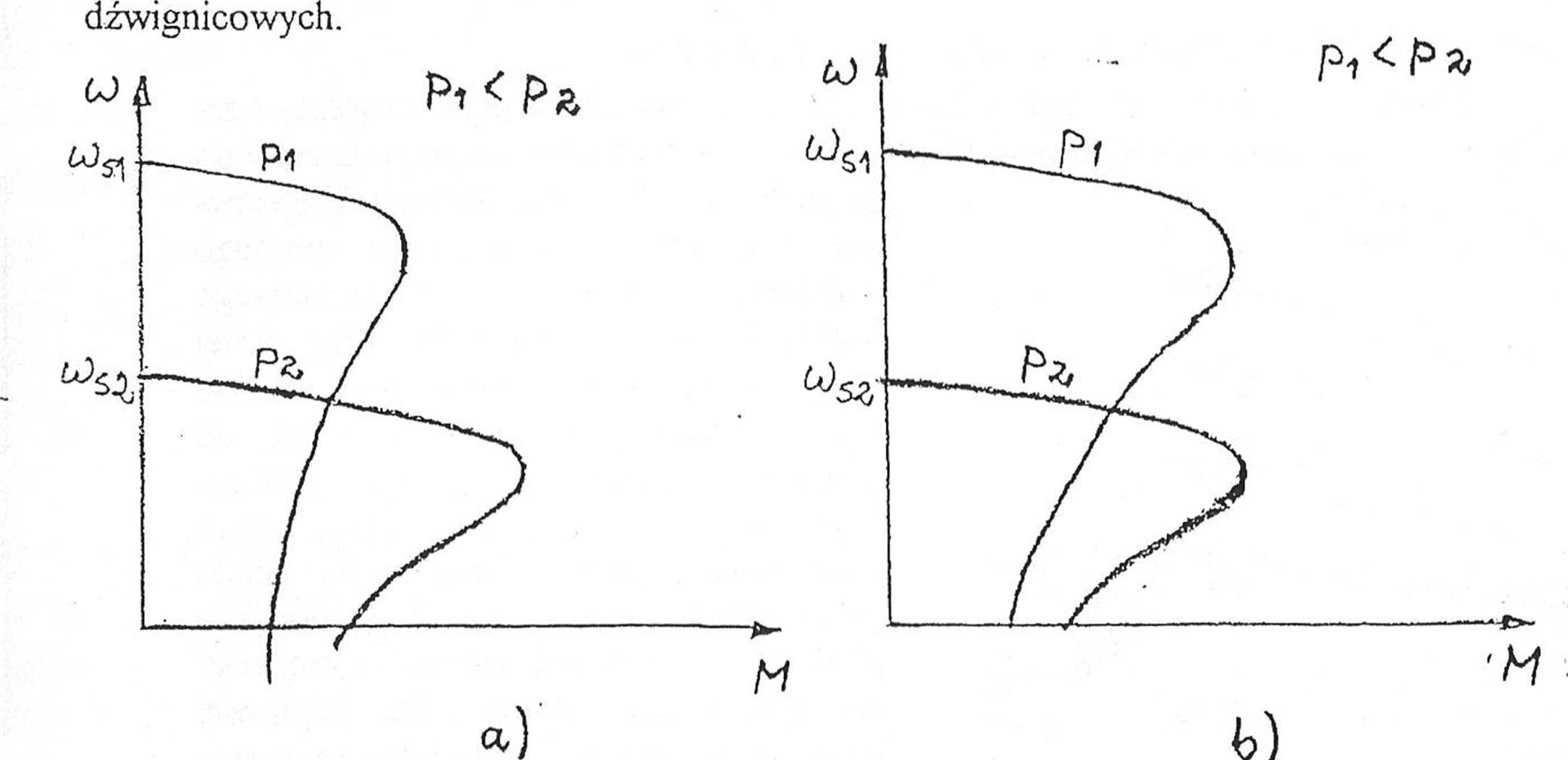
silników dwubiegowych w wykonaniu z
Rys. 6.6. Przebieg charakterystyk mechanicznych zachowaniem stałej mocy (a) i stałego momentu (b)
Wyszukiwarka
Podobne podstrony:
Image 003 WYKŁAD 96. UKŁADY ELEKTROMECHANICZNE Z SILNIKAMI ASYNCHRONICZNYMI 6.1. Charakterystyki mec
Image 010 Wll -6 7. UKŁADY NAPĘDOWE Z SILNIKAMI ASYNCHRONICZNYMI JEDNOFAZOWYMI 7.1 Konstrukcja i ukł
2.2. Zblokowane układy napędowe Silnik, przekładnia główna i skrzynka biegów stanowią tu jeden zespó
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 429 Rys. 10.7. Układy sterowania silników prądu
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 431 Oznaczając przez E2 — napięcie wirnika siln
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 433 Sygnały bramkowe Sygnał bramkowy
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 435 tyrystorowego i falownika npięcia z tyrysto
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 437 zminimalizowanie strat w silniku w procesie
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 439a) UlIN U/N
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 441 Do sterowników tyrystorów GTOb) Szyna
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 443 Rys. 10.24. Przebiegi prędkości i momentu
10.2. UKŁADY NAPĘDOWE Z SILNIKAMI PRĄDU PRZEMIENNEGO 445 Zarówno w przekształtniku prądu przemienneg
Kierunek/Specjalność: MiBM / Silniki Spalinowe Tytuł przedmiotu: Układy napędowe z silnikiem
Wykład 12 - Biologiczne oczyszczanie ścieków i gazów odlotowych Podstawy Biotechnologii TECHNOLOGIA
Wykład 12 - Biologiczne oczyszczanie ścieków i gazów odlotowych Podstawy Biotechnologii TECHNOLOGI
Wykład 12 - Biologiczne oczyszczanie ścieków i gazów odlotowych Podstawy Biotechnologii TECHNOLOGIA
Wykład 12 - Biologiczne oczyszczanie ścieków i gazów odlotowych :: Podstawy Biotechnologii TECHNOLOG
PLAN WYKŁADU 12. OBLICZANIE OBIEGÓW CIEPLNYCH. Elektrownie kondensacyjne, podstawo
Tematyka wykładu Parametry ruchu drgającego Czujnik z masą inercyjną - podstawowe właściwości Odmian
więcej podobnych podstron