Image 003

WYKŁAD 9
6. UKŁADY ELEKTROMECHANICZNE Z SILNIKAMI ASYNCHRONICZNYMI
6.1. Charakterystyki mechaniczne silników asynchronicznych
Budowa silników asynchronicznych
Indukcyjny silnik trójfazowy, nazywany zwykle silnikiem asynchronicznym jest najbardziej rozpowszechnionym silnikiem w napędach przemysłowych. W stojariie silnika znajduje się trójfazowe symetryczne uzwojenie, którego końcówki wyprowadzone są na tabliczkę zasiskową. W zależności od znamionowego napięcia fazowego uzwojenia oraz od napięcia znamionowego sieci zasilającej uzwojenia stojana mogą być połączone w gwiazdę lub w trójkąt. Trójfazowe silniki asynchroniczne są wykonywane w dwóch odmianach konstrukcyjnych różniących się budową wirnika:
- silnik asynchroniczny pierścieniowy ma w wirniku trójfazowe uzwojenie symetryczne. Końcówki tego uzwojenia dołączone są do pierścieni ślizgowych po których ślizgają się szczotki połączone z dodatkowymi zasiskami. Stwarza to dodatkowe możliwości sterowania prędkości silnika.
•
- silnik asynchroniczny zwarty (klatkowy) ma w wirniku uzwojenie klatkowe składające się z umieszczonych w żłobkach nieizolowanych od rdzenia prętów, których końce są zwarte pierścieniami. Całość wykonana jest najczęściej w postaci odlewu z aluminium. Uzwojenia wirnika nie są więc w tym przypadku dostępne dla sterowania. Ze względu na prostotę, niską cenę i niezawodność silniki klatkowe znalazły szeroki^zastosowanie w napędach przemysłowych.
Podstawowymi zaletami silników asynchronicznych w porównaniu z silnikami prądu stałego są:
- brak komutatora charakterystycznego dla maszyn prądu stałego,
- mniejsze gabaryty i masa,
- niższa cena,
- możliwość zasilania bezpośrednio z sieci prądu przemiennego.

6.1.2. Schemat zastępczy
W celu wyznaczenia charakterystyki mechanicznej silnika asynchronicznego posłużymy się schematem zastępczym. Najdogodniejszy do analizy jest schemat typu F z gałęzią magnesującą przyłączoną do zacisków stojana (rys.6.1). Schemat ten jest słuszny przy następujących założeniach:
- parametry wszystkich obwodów są
U
stałe, czyli że sprowadzona rezys-
i
Rys. 6.1. Schemat zastępczy typu Tsilnika asynchronicznego
tancja wirnika Rr nie zależy od częstotliwości obwodu wirnika (pomija • się zjawisko naskórkowości), oraz pomija się nasycenie obwodu magnetycznego,
- pomija się straty w obwodzie magnetycznym,
- nie uwzględnia się strat dodatkowych.
Na rys. 6.1 oznaczono;
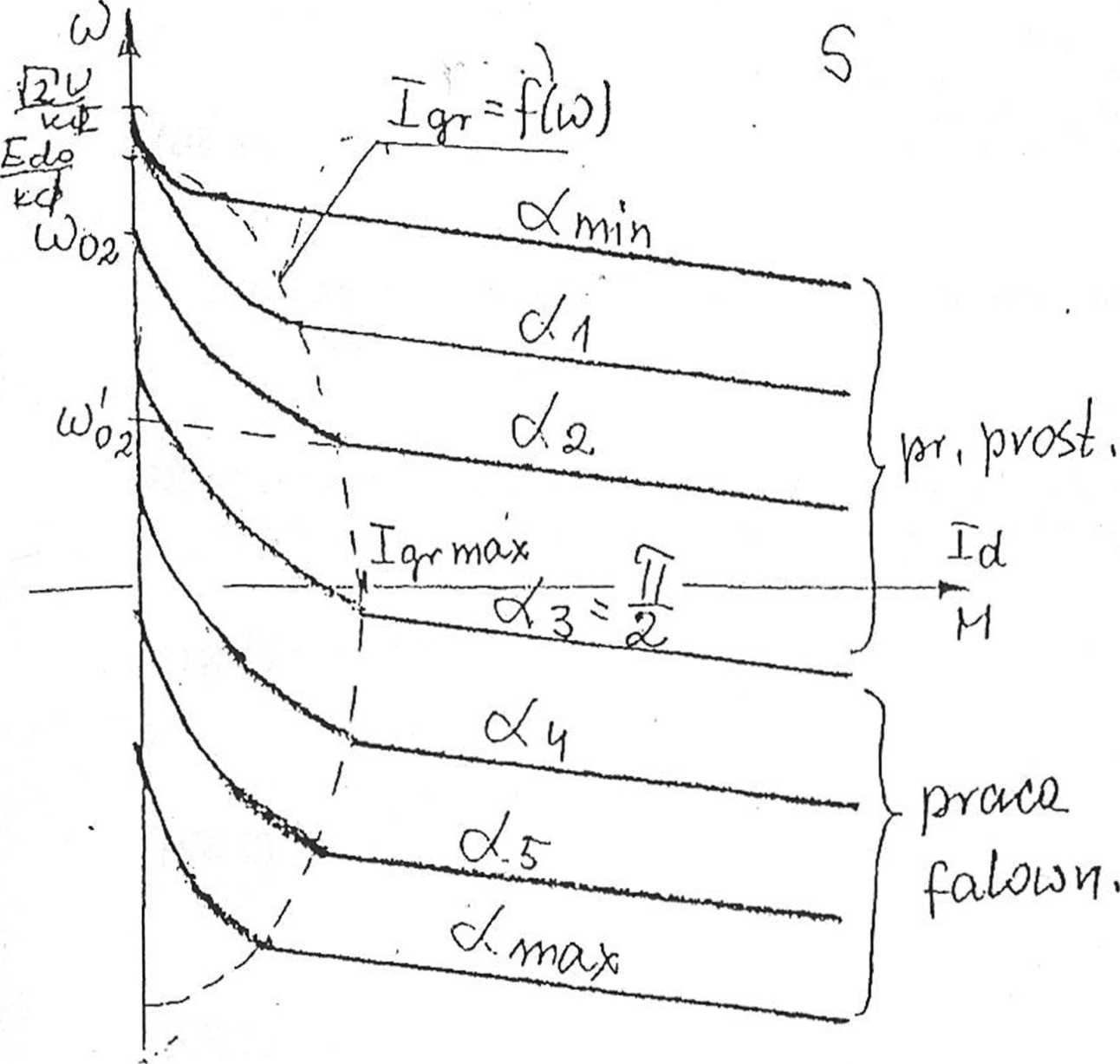
Zakres zmian kata a
^ »V\’ y] *C o/ Ą <ć C>/ g . .
H
Rys. 3.24. Charakterystyki mechaniczne silnika obcowzbud-
nego zasilanego z prostownika tyrystorowego
W5-3
Warunkiem -włączenia tyrystora jest spełnienie warunku:
u(cc)>Em . (3.77)
Minimalna wartość kąta opóźnienia włączenia am-,n powinna zapewniać spełnienie warunku (3.77) w całym zakresie zmian prądu wyprostowanego silnika. W zakresie ztnian kąta a od amj„ do k/2 warość średnia napięcia wyprostowanego Ed jest dodatnia a przekształtnik tyrystorowy znajduje się w zakresie pracy prostowniczej, przekazując energię z sieci zasilającej poprzez obwód prądu stałego do silnika: jest to stan pracy silnikowej napędu, charakterystyki mechaniczne przebiegają powyżej osi momentu (prądu, rys.3.24) oprócz kąta
a-n/2 kiedy napięcie Ed=0, co odpowiada hamowaniu dynamicznemu silnika.
Dla kątów opóźnienia włączenia a>%/2 napięcie wyprasowane jest ujemne. Prostownik tyrystorowy znajduje się w stanie pracy falowniczej , przekazując energię z obwodu prądu stałego do sieci zasilającej. Silnik jest wtedy hamowany odzyskowo, charakterystyki mechaniczne przebiegają poniżej osi prądu. Maksymalna wartość kąta a musi spełnić warunek:
(3.78)
gdzie: y - kąt komutacji falownika dla ama* oraz Idmax,
5 - kąt odzyskania własności zaworowych przez tyrystor.
Niespełnienie warunku (3.78) może spowodować tzw. przewrót falownika.
♦
Prąd wyprostowany Id nie może zmienić kierunku, nie jest więc możliwe w układzie napędowym przedstawionym na rys.3.21 ujemnej wartości momentu silnika. Charakterystystyki mechaniczne obejmują więc tylko ćwiartki I i IV. Przedłużając liniowe części charakterystyk mechanicznych w lewo uzyskuje się prędkości idealnego biegu jałowego:

Edq cos a - MJZ k(p
(3.79)
która jednak w rzeczywistości nie jest osiągalna, gdyż przy małych wartościach prądu wyprostowanego występuje przerywny prąd wyprostowany (rys.3.23.b).
Charakterystyki mechaniczne w zakresie prądów przerywnych.
Dla przewodzenia przerywnego wartość średnia napięcia wyprostowanego Ed zależy nie tylko od kąta opóźnienia włączenia tyrystorów a, ale także od kąta przewodzenia X. Przebieg charakterystyki mechanicznej silnika jest w tym przypadku opisany zależnością:
Wyszukiwarka
Podobne podstrony:
Image 014 WYKŁAD 12 8. UKŁADY NAPĘDOWE Z SILNIKAMI SYNCHRONICZNYMI 8.1. Konstrukcja i podstawow
Image 010 Wll -6 7. UKŁADY NAPĘDOWE Z SILNIKAMI ASYNCHRONICZNYMI JEDNOFAZOWYMI 7.1 Konstrukcja i ukł
535 2 14.2. UKŁADY ELEKTROWNI Z SILNIKAMI SPALINOWYMI elektrycznej i ciepła po rzeczywistych kosztac
SCX 3200 110610 254507 Wykład 1. Omówienie struktury elektronowej atomu w oparciu o zasady mechaniki
3tom175 5. ELEKTROENERGETYKA PRZEMYSŁOWA Rys. 5.9. Charakterystyki mechaniczne silnika indukcyjnego
obwodu elektromagnetycznego silnika i jego podzespołów mechanicznych. Dokumentację tą zestawiono
DSCF0784 159 4.2 Półprzewodnikowe elementy i układy elektroniczne Fototranzystory Rys. 1. Charaktery
generat nap niesin002 2 Analogowe Elementy I Układy Elektroniki Generowany przebieg charakteryzuje s
chka silnika asynchronicznego Charakterystyka silnika asynchronicznego M
DSC03237 (5) 298 TEKST ciowe cechujące niekiedy układy izotopiczne, o których mówiliśmy, charakteryz
Napęd elektryczny, sem. V Typowe charakterystyki mechaniczne maszyn roboczych MR Moment w napędzie
Napęd elektryczny, sem. V Typowe charakterystyki mechaniczne maszyn roboczych MR Moment w napędzie
Rys. 6. Schemat połączeń silników: a) bocznikowego, charakterystyka mechaniczna, b) szeregowego,
Image 008 WYKŁAD 6 3.7,3, Układy nawrotne W napędzie z silnikiem obcowzbudnym zasilanym z prostownik
Image 008 Wll -4 6.5.3. Układy o sterowaniu wewnętrznym Moment elektromagnetyczny silnika jest zależ
silnik asynchroniczny klatkowy 3. Zasada działania silnika asynchronicznego klatkowego Uzwojenie wir
Tadeusz Janiszewski Spiros Mavrantzas Elektroniczne układy wtryskowe silników
więcej podobnych podstron