Image 008
Wll -4
6.5.3. Układy o sterowaniu wewnętrznym
Moment elektromagnetyczny silnika jest zależny od jego prądu. Stosując wymuszenie prądowe uzyskuje się więc szybsze kształtowanie momentu elektromagnetycznego silnika, a więc i lepsze właściwości dynamiczne układu napędowego aniżeli przy zasilaniu napięciowym. Dlatego w układach o sterowaniu wewnętrznym częstotliwości najczęściej stosuje się przemienniki częstotliwości o charakterze źródła prądowego. Jak stwierdzono wcześniej, przy sterowaniu wewnętrznym możliwy jest tylko napęd indywidualny. W najprostszych układach korzysta się z metody stabilizacji strumienia skojarzonego stojana w stanie ustalonym przez zadawanie prądu stojana w zależności od częstotliwości wirnika według zależności (6.27). Schemat funkcjonalny takiego napędu z falownikiem prądu przedstawiono na rys. 6.33, a przebieg charakterystyk mechanicznych silnika na rys. 6.34. Napęd zawiera nadrzędny obwód regulacji prędkości. Sygnałem wyjściowym regulatora prędkości Rco jest zadana wartość częstotliwości wirnika fra. W bloku nieliniowym BN realizowana jest zależność (6.27). Sygnał zadanej częstotliwości fsz stojana uzyskuje się z zsumowania zadanej częstotliwości wirnika fa i sygnału proporcjonalnego do prędkości silnika co, co wynika z zależności:
co
Pb
(l--s) => fs=p-<n + sfs =P~m + fr-
2 TC
2/T
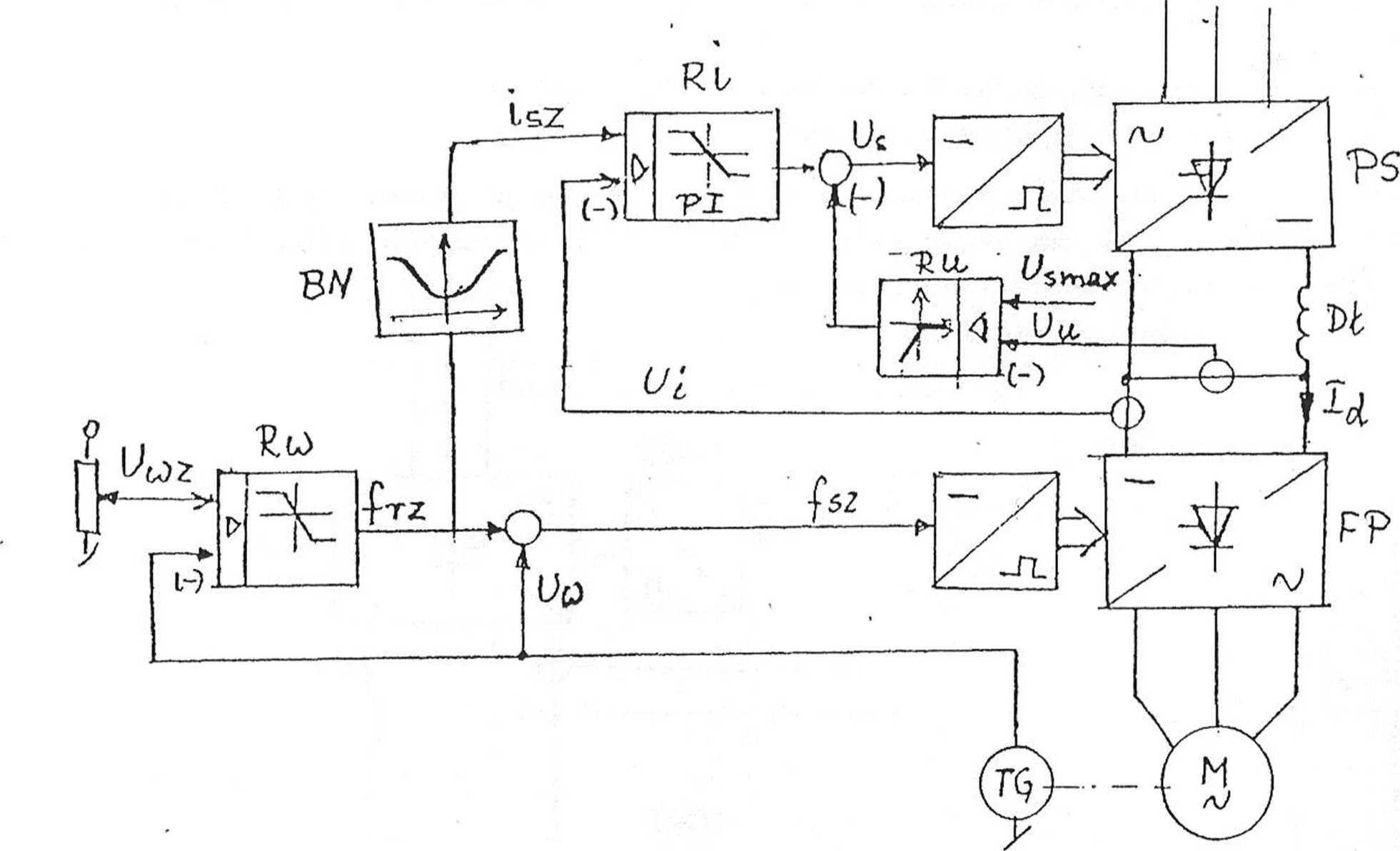
Rys. 6.33. Schemat funkcjonalny napędu z silnikiem asynchronicznym zasilanym z falownika
prądu przy pośredniej stabilizacji strumienia przez charakterystyki prąd-częstotliwość wirnika
(6.49)
Charakterystyki mechaniczne napędu są przy zastosowaniu regulatora prędkości typu PI lub PID idealnie sztywne, a przy obciążeniu przewyższającym dopuszczalną wartość prądu stają się idealnie miękkie.
Przy zastosowaniu falowników napięciowych lub cyklokonwertorów w układach sterowania wewnętrznego, wyposaża się je w obwody regulacji prądy, czyniąc z nich źródła o charakterze prądowym. Przykładowe rozwiązanie takiego napędu przedstawiono na rys. 6.35. Silnik asynchroniczny zasilany jest z falownika napięcia MSI. Układ zadający GZ generuje trzy
WYKŁAD 10
63 Rozruch silników asynchronicznych
Celem stosowania układów rozruchowych silników asynchronicznych jest przede wszystkim ograniczenie prądu pobieranego przez silnik z sieci zasilającej. Ze względu na różnice w budowę silników pierścieniowych i zwartych ich układy rozrycowe są także różne.
6,3.1. Rozruch silników pierścieniowych
Silniki pierścieniowe posiadają stosunkowo niewielki moment rozruchowy i znaczny prąd rozruchowy. Na przykład silnik o prędkości znamionowej nn = 1460 obr/min i przeciążalności pM= 2,2 rozwijałby na charakterystyce naturalnej moment rozruchowy Mr = 0.48 Mn przy prądzie pobieranym z sieci ronym około pięciokrotnej wartości prądu znamionowego. W celu zwiększenia momentu rozruchowego i obniżenia do wartości dopuszczalnej prądu rozruchowego włącza się do obwodu wirnika oporności dodatkowe (rys. 6.15). Proces rozruchu przebiega podobnie jak przy rezystancyjnym rozruchu silnika obcowzbudnego prądu stałego. W celu wyznaczenia ilości stopni rozruchowych oraz wartości oporności na poszczególnych stopniach należy znać:
- moment obciążenia silnika Mm podczas rozruchu, lub odpowiadający mu prąd wirnika (ponieważ rozruch prowadzony jest na prostoliniowych częściach charakterystyk mechanicznych silnika zakłada się proporcjonalność prądu wirnika silnika do jego momentu),
- dopuszczalną wartość prądu wirnika l2max lub momentu silnika M^ w czasie rozruch (zwykle
przyjmuje się < 2I2N lub < 0,74-0,8 Mk).
- minimalną wartość prądu wirnika I2min Nb momentu silnika w czasie rozruchu, które wyznaczamuy z zależności:
min — Nb 72 min — m
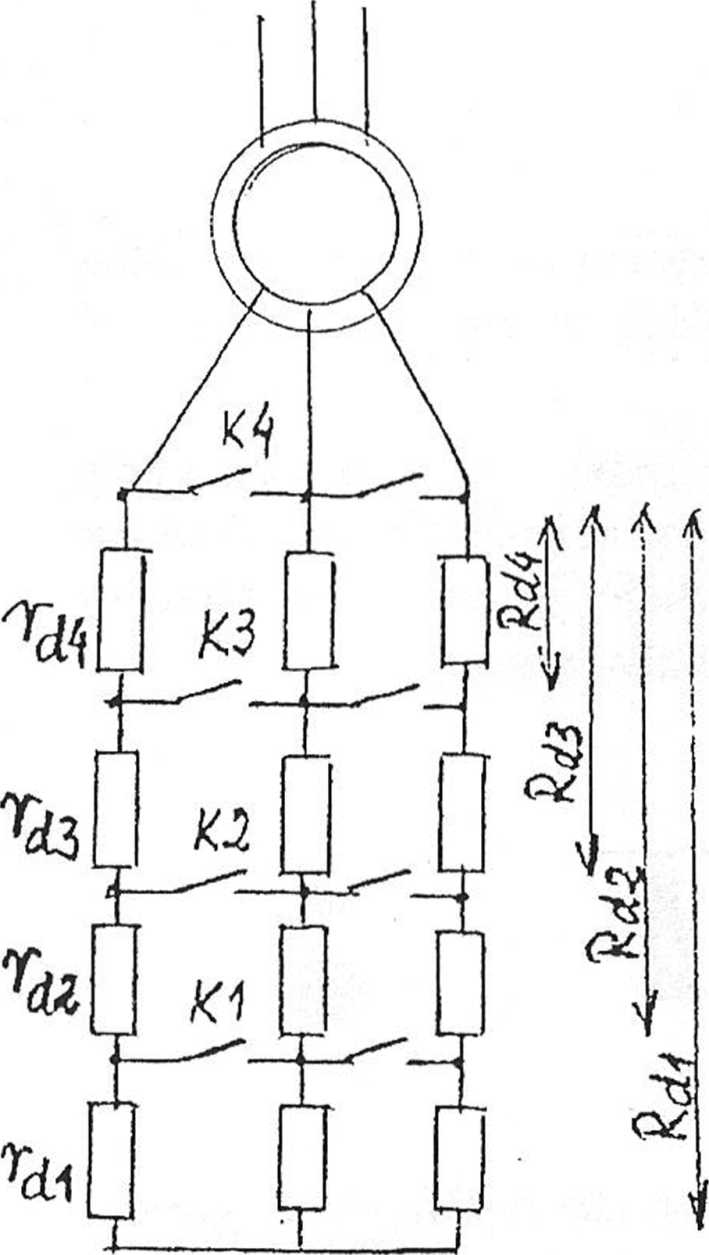
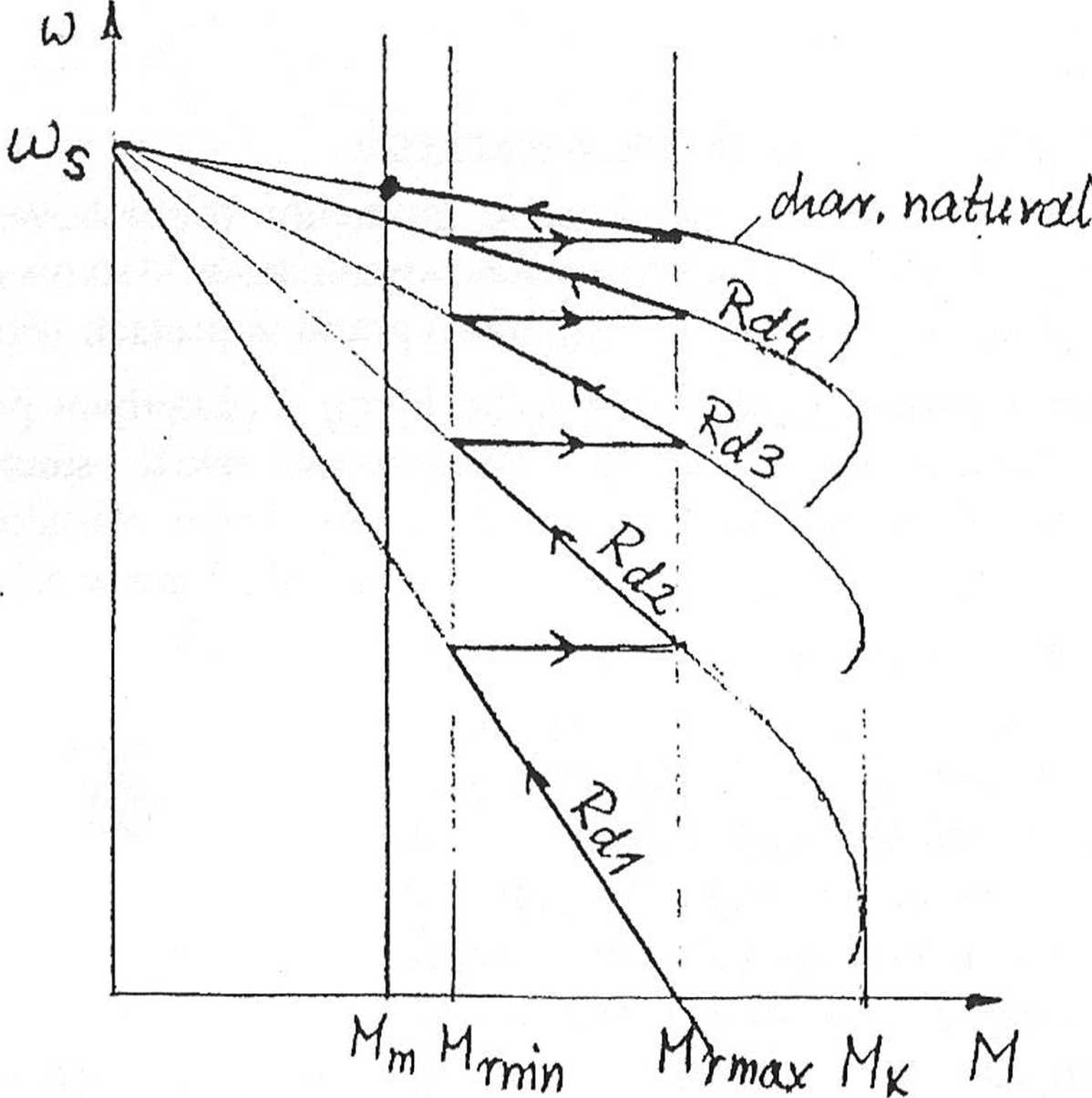
Rys. 6.15. Rozruch rezystancyjny trójfazowego silnika asynchronicznego pierścieniowego
Wyszukiwarka
Podobne podstrony:
Image 008 WYKŁAD 6 3.7,3, Układy nawrotne W napędzie z silnikiem obcowzbudnym zasilanym z prostownik
Image 010 Wll -6 7. UKŁADY NAPĘDOWE Z SILNIKAMI ASYNCHRONICZNYMI JEDNOFAZOWYMI 7.1 Konstrukcja i ukł
CCF20111125�011 (3) 6.7. Moment elektromagnetyczny maszyny indukcyjnej6.7.1. Zależność między mocą i
Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M0bc, o m
Rys. 6. Wybrane układy sterowania i automatycznej regulacji przemysłowego silnika gazowego napędzają
DSCF0782 4.2 Półprzewodnikowe elementy i układy elektroniczne 157 Pole obszaru pracy jest zależne od
Image 77 81 Rys. 3.37. Schemat ideowy elektrycznego silnika prądu stałego ze wzbudzeniem od magnesów
skrypt085 (2) 168 Laboratorium Podstaw Elektrotechniki I n więc jest większa od pulsacji rezonansowe
Indukowany przez promieniowanie drgający moment dipolowy jest zależny od polaryzowalności
Okresowy charakter zmian elektroujemności w skali Paulinga w zależności od liczby atomowej Z pi
55715 P1220174 <tr*Wskaźniki operacyjne -moment obrotowy silnika Jest to Średnia w artość momentu
0000070 (2) jonizacji i LET promieniowania elektromagnetycznego w tkankach miękkich, w zależności od
Wykres: Produkcja energii elektrycznej i moc zainstalowana w zależności od źródeł12 W trosce o dalsz
zadania mata 631. Rozwiąż układy równań i przeprowadź dyskusję istnienia i liczby rozwiązań w zależn
Okresowy charakter zmian elektronegatywności w skali Paulinga w zależności od liczby atomowej
więcej podobnych podstron