5654708830
Jeżeli moment napędowy M (elektromagnetyczny) silnika będzie większy od momentu obciążenia M0bc, o moment strat jałowych Mo, czyli:
M=M0bc+Mo,
robrl
[min J
której odpowiada prędkość kątowa
wirnik będzie wirował z prędkością n\ -
^ _ 27W/ l/ac/ I będzie wykonywał pewną pracę nawet przy biegu jałowym,
60 s J
pokonując straty mocy w łożyskach i na wentylację.
A. Bieg jałowy silnika - stan pracy, w którym do uzwojenia stojana doprowadzone jest napięcie, obwód wirnika jest zamknięty, a wał silnika nie jest obciążony. Wirnik wiruje z prędkością coo zbliżoną do prędkości synchronicznej, gdyż poślizg $o = 0,001.
Silnik pobiera niewielką moc czynną Po, która jest zużywana na pokrycie strat:
- w uzwojeniu stojana APO(0 = mlRllj0
- w rdzeniu stojana APFe0 = mxExlFe
gdzie: 7fc -składowa czynna prądu stanu jałowego h, E\ - siła elektromotoryczna indukowana w uzwojeniu stojana, przy czym E\ ~ U\.
- mechanicznych APm.
Ze względu na małą częstotliwość napięcia wirnika fi = sf\ pomijalnie małe są straty mocy w rdzeniu oraz uzwojeniu wirnika.
Bilans mocy dla stanu jałowego P0 = APO(0 + APFe0 + APm.
Straty niezależne od prądu obciążenia nazywane są stratami jałowymi, są to straty stałe AP0=P0- APCu0 = APFe + APm.
Silnik na biegu jałowym, zasilany napięciem znamionowym obciąża sieć zasilającą prądem /„ =(0,25 + 0,5)/,.
a w silnikach małych mocy nawet do 0,7/n.
Współczynnik mocy przy biegu jałowym costp = 0,1 -f 0,2,
co wskazuje, że silnik w tym stanie pracy pobiera niemal wyłącznie moc bierną i z tego względu silniki indukcyjne nie obciążone powinny być wyłączane z sieci.
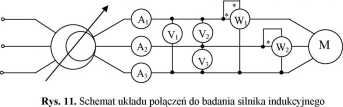
Badania silnika na biegu jałowym przeprowadzone w układzie jak na rys. 11 pozwalają wyznaczyć Po, /o oraz coscpo i zbadać wpływ napięcia zasilającego na te parametry. Pomiary wykonuje się zmniejszając napięcie od 1,3 C/n do wartości, przy której silnik zaczyna wyraźnie zwalniać i przedstawia w postaci charakterystyk biegu jałowego (rys. 12).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Wyszukiwarka
Podobne podstrony:
skanuj0087 174 piawo Ohma, a opór właściwy elektrolitu jest dużo większy od oporu właściwego elektro
Image 008 Wll -4 6.5.3. Układy o sterowaniu wewnętrznym Moment elektromagnetyczny silnika jest zależ
skanuj0087 I /4 l«;iwo Ohma, a opór właściwy elektrolitu jest dużo większy od oporu właściwego elekt
skrypt085 (2) 168 Laboratorium Podstaw Elektrotechniki I n więc jest większa od pulsacji rezonansowe
skanuj0021 2 będzie na T~* >:s: 1gt1 • Jeśli ta wysokość będzie większa od wyso
CCF20111010�024 46 będzie większa od twardości ogólnej, to badana woda zawiera wodorowęglan sodowy l
Automatyzacja z wykorzystaniem napędów elektrycznych Zaufaj partnerowi ustalającemu od dziesięciolec
Obraz (2602) 96 •fizyczna powierzchnia elektrody jest zwykle większa od powierzchni geometrycznej. S
Oprogramowanie - PositioningDrives do doboru napędów elektrycznych silniki prądu stałego, prowadnice
87813 Obraz (2602) 96 •fizyczna powierzchnia elektrody jest zwykle większa od powierzchni geometrycz
CCF20091208�000 4. Masa poruszającego się elektronu jest 4 razy większa od jego masy spoczynkowej. Z
więcej podobnych podstron