MMMMMM
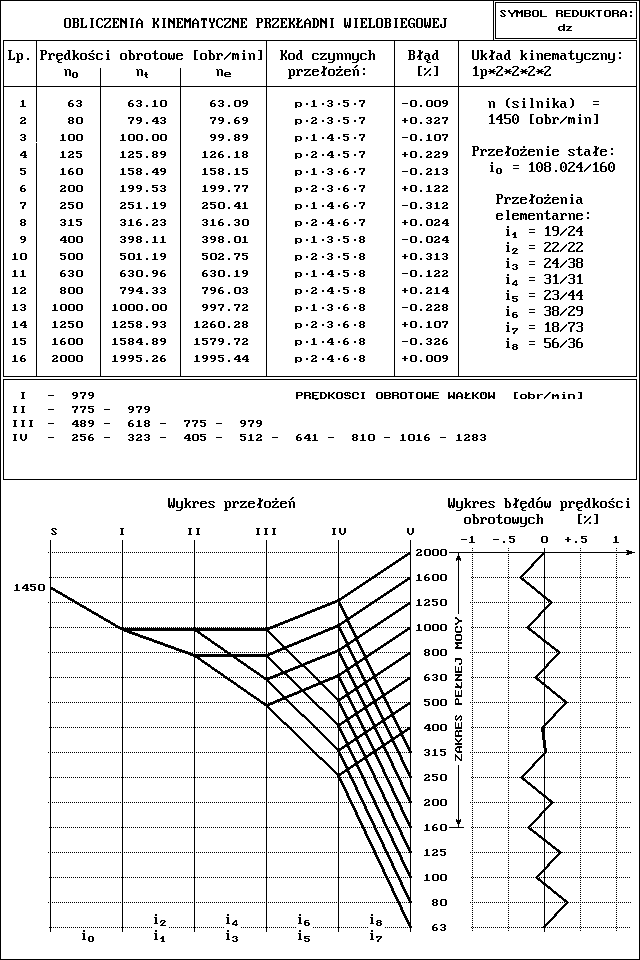
OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ
SYMBOL REDUKTORA: dz
|
Lp. |
Prędkości obrotowe lobr/min] |
Kod czynnych |
Bł^d |
Układ kinematyczny: | ||
|
"o |
"ł |
Ile |
przełożeń: |
[/] |
lp*Z*Z*Z*Z | |
|
i |
63 |
63 . IO |
63.09 |
p -1 -3 -5 -7 |
-0.009 |
n (silnika) = |
|
2 |
80 |
79.43 |
79.69 |
p -2 -3 -5 -7 |
+0.327 |
1450 lobr/min] |
|
3 |
lOO |
100.00 |
99.89 |
p-1-4 -5 -7 |
-0.107 | |
|
4 |
125 |
125.89 |
126.18 |
p-2-4 -5 -7 |
+0.229 |
Przełożenie stałe: |
|
5 |
160 |
158.49 |
158.15 |
p -1 -3 -6 -7 |
-0.213 |
io = 108.0Z4/160 |
|
6 |
200 |
199.53 |
199.77 |
p -2 -3 -6 -7 |
+0.122 | |
|
7 |
250 |
251.19 |
250.41 |
p-1-4 -6 -7 |
-0.312 |
Przełożenia |
|
elementarne: | ||||||
|
8 |
315 |
316.23 |
316.30 |
p-2-4 -6 -7 |
+0.024 | |
|
ii = 19/Z4 | ||||||
|
9 |
400 |
398.11 |
398.Ol |
p -1 -3 -5 -8 |
-0.024 | |
|
i2 = ZZ/ZZ | ||||||
|
io |
500 |
501.19 |
502.75 |
p -2 -3 -5 -8 |
+0.313 |
i3 = Z4/38 |
|
11 |
630 |
630.96 |
630.19 |
p-1-4 -5 -8 |
-0.122 |
U = 31/31 |
|
12 |
800 |
794.33 |
796.03 |
p-2-4 -5 -8 |
+0.214 |
i5 = Z3/44 |
|
13 |
lOOO |
1000.00 |
997.72 |
p -1 -3 -6 -8 |
-0.228 |
i6 = 38/Z9 |
|
14 |
1250 |
1258.93 |
1260.28 |
p -2 -3 -6 -8 |
+0.107 |
i7 = 18/73 |
|
15 |
1600 |
1584.89 |
1579.72 |
p-1-4 -6 -8 |
-0.326 |
i8 = 56/36 |
|
16 |
2000 |
1995.26 |
1995.44 |
p-2-4 -6 -8 |
+0.009 | |
|
I |
979 |
PRĘDKOŚCI OBROTOWE WAŁKÓW [obr/nin] | ||||
|
11 |
775 |
979 | ||||
|
III |
489 |
618 - |
775 - 979 | |||
|
IU |
256 |
323 - |
405 - 512 |
641 - 810 - |
1016 - 1283 | |
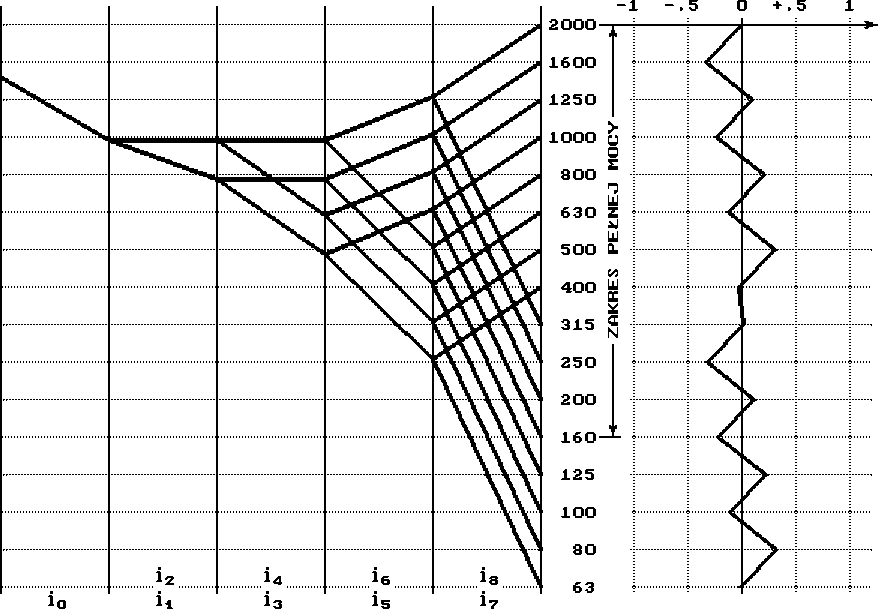
Uykres błędów prędkości obrotowych [/]
Uykres przełożeń
11
iii
iu
1450
Wyszukiwarka
Podobne podstrony:
siatka z poprawka OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: dz Lp. Prędko
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: lb Lp. Prędkości obrotow
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: bl Lp. Prędkości obrotow
WYNIK2 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: RN Lp. Prędkości obrotow
WYNIK5 BMP OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA nac i o Lp. Prędkości
WYNIK0 BMP OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA
WYNIK1 BMP OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA
Wykres OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
Wynik0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
Wynik0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkość "o :i obrotowe :
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkość "o :i obrotowe :
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
Wynik10 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK1 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkość "o :i obrotowe :
WYNIK2 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
więcej podobnych podstron