WYNIK0
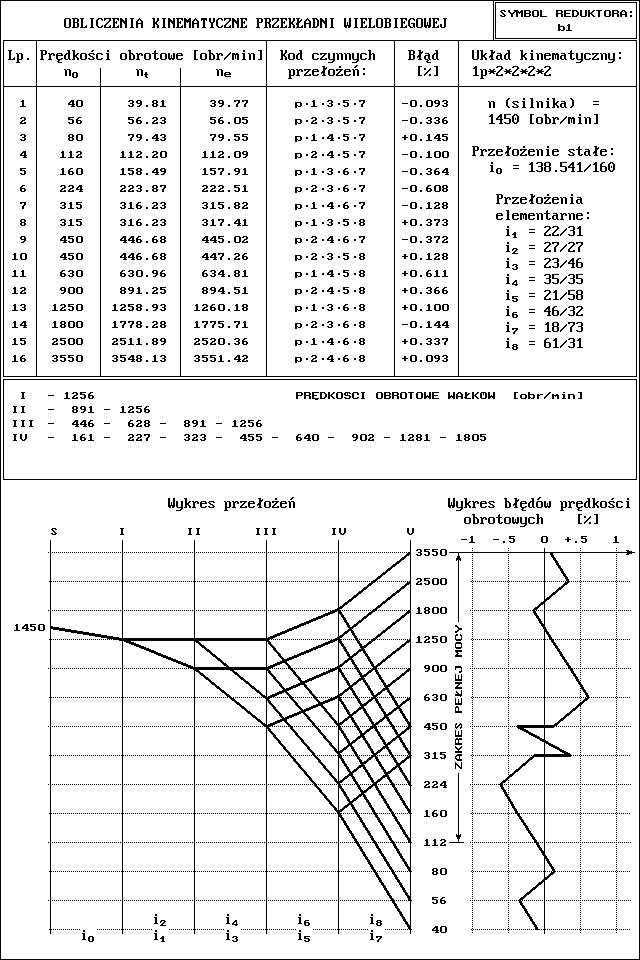
OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ
SYMBOL REDUKTORA: bl
|
Lp. |
Prędkości obrotowe lobr/min] |
Kod czynnych |
Bł^d |
Układ kinematyczny: | ||
|
"o |
"ł |
Ile |
przełożeń: |
[/] |
lp*Z*Z*Z*Z | |
|
i |
40 |
39.81 |
39.77 |
p -1 -3 -5 -7 |
-0.093 |
n (silnika) = |
|
2 |
56 |
56.23 |
56.05 |
p -2 -3 -5 -7 |
-0.336 |
1450 lobr/min] |
|
3 |
80 |
79.43 |
79.55 |
p-1-4 -5 -7 |
+0.145 | |
|
4 |
112 |
112.20 |
112.09 |
p-2-4 -5 -7 |
-0.100 |
Przełożenie stałe: |
|
5 |
160 |
158.49 |
157.91 |
p -1 -3 -6 -7 |
-0.364 |
io = 138.541/160 |
|
6 |
224 |
223.87 |
222.51 |
p -2 -3 -6 -7 |
-0.608 | |
|
7 |
315 |
316.23 |
315.82 |
p-1-4 -6 -7 |
-0.128 |
Przełożenia |
|
elementarne: | ||||||
|
8 |
315 |
316.23 |
317.41 |
p -1 -3 -5 -8 |
+0.373 | |
|
ii = ZZ/31 | ||||||
|
9 |
450 |
446.68 |
445.02 |
p-2-4 -6 -7 |
-0.372 | |
|
i2 = Z7/Z7 | ||||||
|
io |
450 |
446.68 |
447.26 |
p -2 -3 -5 -8 |
+0.128 |
i3 = Z3/46 |
|
11 |
630 |
630.96 |
634.81 |
p-1-4 -5 -8 |
+0.611 |
U = 35/35 |
|
12 |
900 |
891.25 |
894.51 |
p-2-4 -5 -8 |
+0.366 |
i5 = Z1/58 |
|
13 |
1250 |
1258.93 |
1260.18 |
p -1 -3 -6 -8 |
+0.100 |
i6 = 46/3Z |
|
14 |
1800 |
1778.28 |
1775.71 |
p -2 -3 -6 -8 |
-0.144 |
i7 = 18/73 |
|
15 |
2500 |
2511.89 |
2520.36 |
p-1-4 -6 -8 |
+0.337 |
i8 = 61/31 |
|
16 |
3550 |
3548.13 |
3551.42 |
p-2-4 -6 -8 |
+0.093 | |
|
I |
- 1256 |
PRĘDKOŚCI OBROTOWE WAŁKÓW [obr/nin] | ||||
|
11 |
891 |
- 1256 | ||||
|
III |
446 |
628 - |
891 - 1256 | |||
|
IU |
161 |
227 - |
323 - 455 |
640 - 902 - |
1281 - 1805 | |
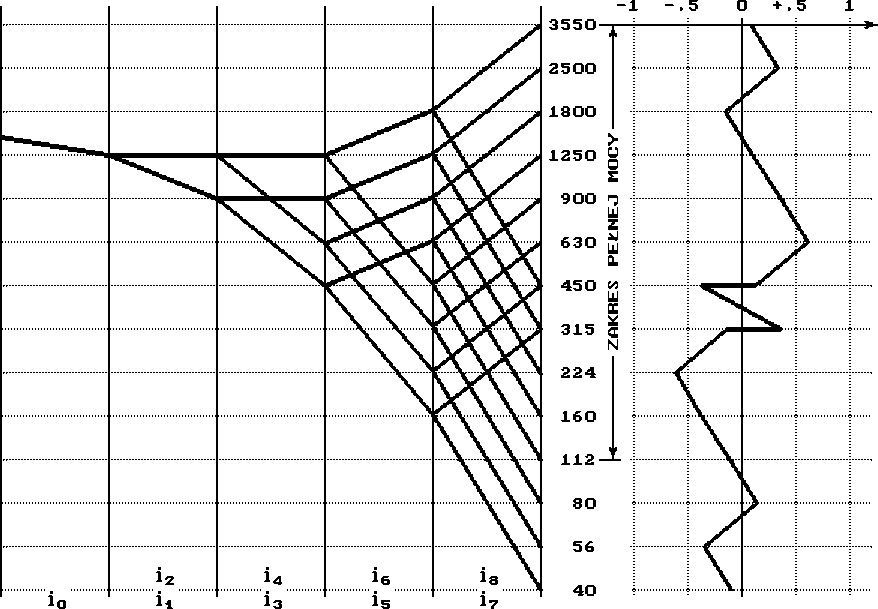
Uykres błędów prędkości obrotowych [/]
Uykres przełożeń
11
iii
iu
1450
Wyszukiwarka
Podobne podstrony:
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: lb Lp. Prędkości obrotow
siatka z poprawka OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: dz Lp. Prędko
WYNIK2 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: RN Lp. Prędkości obrotow
WYNIK5 BMP OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA nac i o Lp. Prędkości
MMMMMM OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA: dz Lp. Prędkości obrotow
WYNIK0 BMP OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA
WYNIK1 BMP OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ SYMBOL REDUKTORA
Wynik0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
Wynik0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkość "o :i obrotowe :
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkość "o :i obrotowe :
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
Wykres OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK0 OBLICZENIA KINEMATYCZNE PRZEK¥ADNI UIELOBIEGOUEJ Lp. Prrdkoyci obrotowe lobr/min] Kod
Wynik10 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkości obrotowe lobr/min] Kod
WYNIK1 OBLICZENIA KINEMATYCZNE PRZEKŁADNI UIELOBIEGOUEJ Lp. Prędkość "o :i obrotowe :
więcej podobnych podstron