Slajd92 (5)
AUTONOMICZNE ROBOTY MOBILNE - zastosowanie przemysłowe perspektywy ...
Europejski projekt NOMAD:
- s p a wa nie dużych ko n str u kc i i stal o wy c h.
- połączenie autonomicznej p i atf o r rn y (Robot Transport VehjęJe) z ramieniem u n i we r s a i n e q o r o b ota p rze myślowe q o.
- platforma mobilna wyposażona w cały niezbędny osprzęt potrzebny do procesu spajania
- nawigacja i określanie położenia (platformy i ramienia robota) oparte na systemach rozpoznawania obrazu, nawigacji globalnej oraz lokalnej (te ostatnie oparte o czujniki laserowe),
- model przestrzenny obrabianego obiektu (na podstawie obrazów z kamer na robocie) -> porównanie z zarysem teoretycznym (zawartym w komputerze głównym) -> niezbędne korekty -> spawanie.
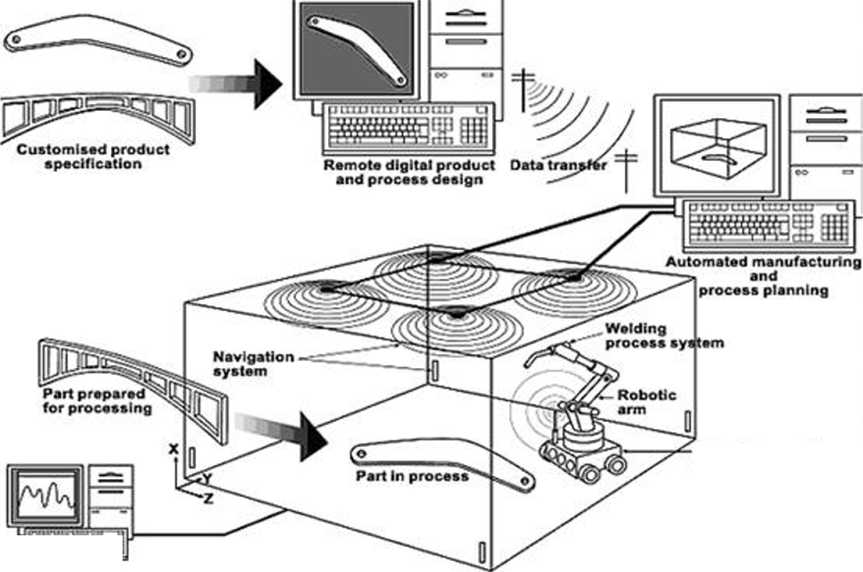
Robot transport yohiclo (RTV)
iMKfeig 1H
Automated procasa controtler

Wyszukiwarka
Podobne podstrony:
Slajd90 (5) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» bezpieczeństwo AGV zwiększa ja bezpieczeństwo
Slajd91 (5) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» bezpieczeństwo Aby zminimalizować zagrożenia,
Slajd85 (7) AUTONOMICZNE ROBOTY MOBILNE - Obsługa baz załadunkowych: jeżdżące -> przykłady zastos
Slajd87 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» przykłady zastosowań AGV Transport surowców&nb
Slajd89 (7) AUTONOMICZNE ROBOTY MOBILNE - Indywidualne potrzeby klientów: - jeżdżące -> przykłady
25136 Slajd88 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» przykłady zastosowań AGV Transport bel p
25400 Slajd86 (7) AUTONOMICZNE ROBOTY MOBILNE - jeżdżące -» przykłady zastosowań AGV Obsługa maszyn
więcej podobnych podstron