kinematykaw 00002
40kin
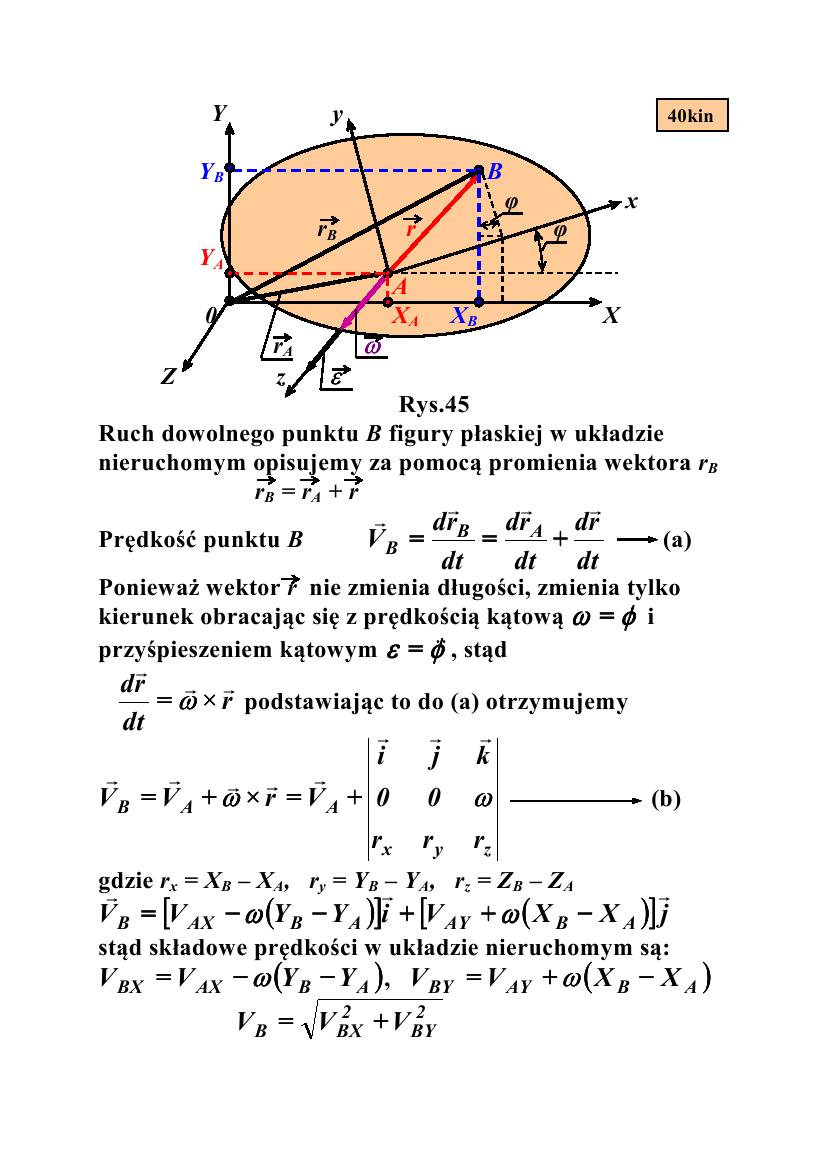
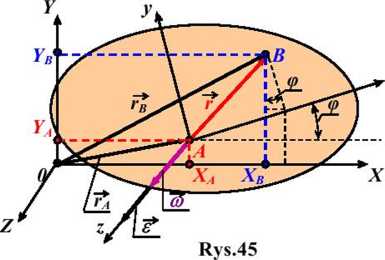
Ruch dowolnego punktu B figury płaskiej w układzie
nieruchomym opisujemy za pomocą promienia wektora rB ->
rB = rA+ r
Prędkość punktu B
- drR dr4 dr
VR = —«=^1 + — —(a)
dt dt dt
Ponieważ wektor"?" nie zmienia długości, zmienia tylko kierunek obracając się z prędkością kątową CO = <f) i przyśpieszeniem kątowym e = $, stąd dr _ _
dt
= CO x r podstawiając to do (a) otrzymujemy
(b)
VR = V A+a)*r = V4 +
y z
gdzie rx = XB- XA, ry =YB- YA, r: = ZB- ZA
Vb = [vax-co{yB-rJF + far + <o(XB-XA)]j
stąd składowe prędkości w układzie nieruchomym są:
Vbx =Vax-<»(Yb ~Ya),yBr=YAr + ®(*8
Yb
BY
Wyszukiwarka
Podobne podstrony:
40kin -7X X z O Rys.45 Ruch dowolnego punktu B figury płaskiej w układzie nieruchomym (^isiderr^ za
Slajd17 Ruch dowolnego punktu B figury płaskiej w układzie nieruchomym opisany jest za pomocą:
Slajd18 3 Prędkość w ruchu dowolnego punktu B figury płaskiej
Slajd19 2 Przyspieszenie w ruchu dowolnego punktu B figury płaskiej dvP dvA do
IMAG0077 (2) 1 Zaznacz poprawne twierdzenia Prędkość dowolnego punktu B figury płaskiej , poruszając
Slajd13 Prędkość w ruchu dowolnego punktu B figury płaskiejxB = r cos cpj + rJ3-sin2 cp1cp1 = ©jt
Slajd14 Przyspieszenie w ruchu dowolnego punktu B figury płaskiej 14
Opis ruchu za pomocą promienia wektora Opis ruchu punktu za pomocą promienia wektora
Slajd15 2 Tw. Dowolne przemieszczenie figury płaskiej w jej płaszczyźnie może być dokonane za
Biomechanika kinematyka Ramieniem siły względem dowolnego punktu jest najkrótsza odległość między
Slajd23 Tw. Eulera Dowolne przemieszczenie figury płaskiej w jej płaszczyźnie może być dokonane
więcej podobnych podstron