P1080324
9. Układy sensoryczne
- odległości między charakterystycznymi punktami obrazu, np. środka cb kości powierzchni i obwiedni, długości większej i mniejszej osi obiektu
- występowanie lub brak odcinków prostych albo okręgów w obwieH. niach obrazu.
Wymienione cechy nie zależą od położenia i orientacji obiektu, są one natomiast wyróżnikami kształtu obiektu.
3) Blok identyfikacji i klasyfikacji obiektu służy do porównywania wyrok ników obiektu analizowanego z wyróżnikami obiektu wzorcowego. Niech P będzie (/-tym parametrem (wyróżnikiem) analizowanego obiektu, a Pqm będzie (/-tym parametrem obiektu wzorcowego, a (q) maksymalną różnicą między parametrami obiektu wzorcowego i analizowanego. Współczynnik poprawnej identyfikacji obiektu będzie określony przez
[1 dla|<</(ł) i
[0 w przeciwnym przypadku
9.5.3.2. Zagadnienia zastosowania układów wizyjnych w robotach
W sterowaniu robotem do opisu położenia efektora w przestrzeni wykorzystuje się zbiór wartości liniowych i kątowych przemieszczeń jego przegubów, które pozwalają uzyskać określoną pozycję końcówki manipulatora. By sterować ruchem robota na podstawie informacji o położeniu obiektu, jest konieczna transformacja współrzędnych między jednym a drugim układem odniesienia, co polega na rozwiązaniu zagadnienia kinematyki odwrotnej. Gdy położenie obiektu jest wyznaczane na podstawie informacji wizyjnej, niezbędne są dodatkowe mechanizmy umożliwiające odniesienie obrazu z kamery do aktualnego położenia końcówki manipulatora. W tym zakresie stosuje się różne rozwiązania. Sygnał błędu można wyznaczyć np. na podstawie parametrów obrazu. Innym rozwiązaniem jest wstępna lokalizacja obiektu w zarejestrowanym obrazie, wyznaczenie jego pozycji w trójwymiarowym układzie współrzędnych, w którym pracuje robot i obliczenie różnicy między aktualnym położeniem obiektu i manipulatora.
Zastosowanie układów wizyjnych w robotach przemysłowych wymaga zatem rozpatrzenia i rozwiązania kilku zagadnień.
Pierwszym z nich jest sposób zamontowania kamery wizyjnej. Kamera może być montowana niezależnie (na stałe) lub na robocie (rys. 9.28 i 9.29). Głównym kryterium tworzonego systemu jest jak najlepsze rozpoznanie położenia części, a następnie przekazanie do robota informacji o tym położeniu.
W przypadku ruchomej kamery zamontowanej na końcówce efektora robola lub innej jego części ważne jest precyzyjne wyznaczenie pozycji kamery w trójwymiarowym układzie współrzędnych, w którym pracuje robot i obliczenie różnicy między aktualnym położeniem obiektu i manipulatora. Sygnał błędu moż* 294 na wyznaczyć np. na podstawie parametrów obrazu. Zadanie to jest realizowane


Rysunek 9*28______
Możliwości Zamontowania kamery wizyjnej: a) kamera mocowana na stałe, b) kamera mocowana na robocie [253]
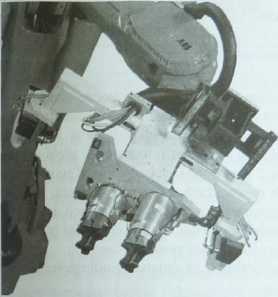
Rysunek 9.25^_
Robot z kamerą oraz oświetleniem zamontowanym tak, by uzyskać obraz o odpowiednich parametrach [198]
w trakcie kalibracji układu kamera-robot. Jeżeli nie zostanie ona przeprowadzona wystarczająco precyzyjnie, to zmaleje też dokładność całego systemu. Możliwych jest kilka sposobów kal ibracj i. Najprostsza jest kalibracja dwupunk-towo, w której użytkownik wybiera punkty w polu widzenia kamery jednakowo °d niej oddalone i wprowadza do systemu ich rzeczywistą odległość, wykorzystywaną w dalszych obliczeniach jako punkt odniesienia. Innym rozwiązaniem jest plansza kalibracyjna w postaci siatki kółek, która jest umieszczana na pła-skiej powierzchni w polu widzenia kamery (rys. 9.30). Ta metoda pozwala jednocześnie skorygować błędy perspektywy. Dostępna jest też opcja tzw. automatycznej ka//óracy/^kamera-robot. Polega ona na rejestracji obrazów w trakcie 295
Wyszukiwarka
Podobne podstrony:
P1080319 9. Układy sensoryczne 9.4.2. Przetworniki siły i naprężeń Wyposażenie chwytaka w przetworni
67726 P1080325 9. Układy sensoryczne ruchu ramienia robota przy różnych jego ustawieniach. Kalibracj
więcej podobnych podstron