P1080334
10. Sztuczna inteligencja w robotyce
Zmodyfikowana waga
00.2)
W procesie samouczenia, opisanym powyższym modelem, modyfikacji i podlegają tylko wagi tych połączeń, które są aktywne w czasie pobudzenia ko-\ mórki. Oznacza to, że neuron z upływem czasu staje się coraz bardziej podatny na to wymuszenie, które uaktywnia go najczęściej.
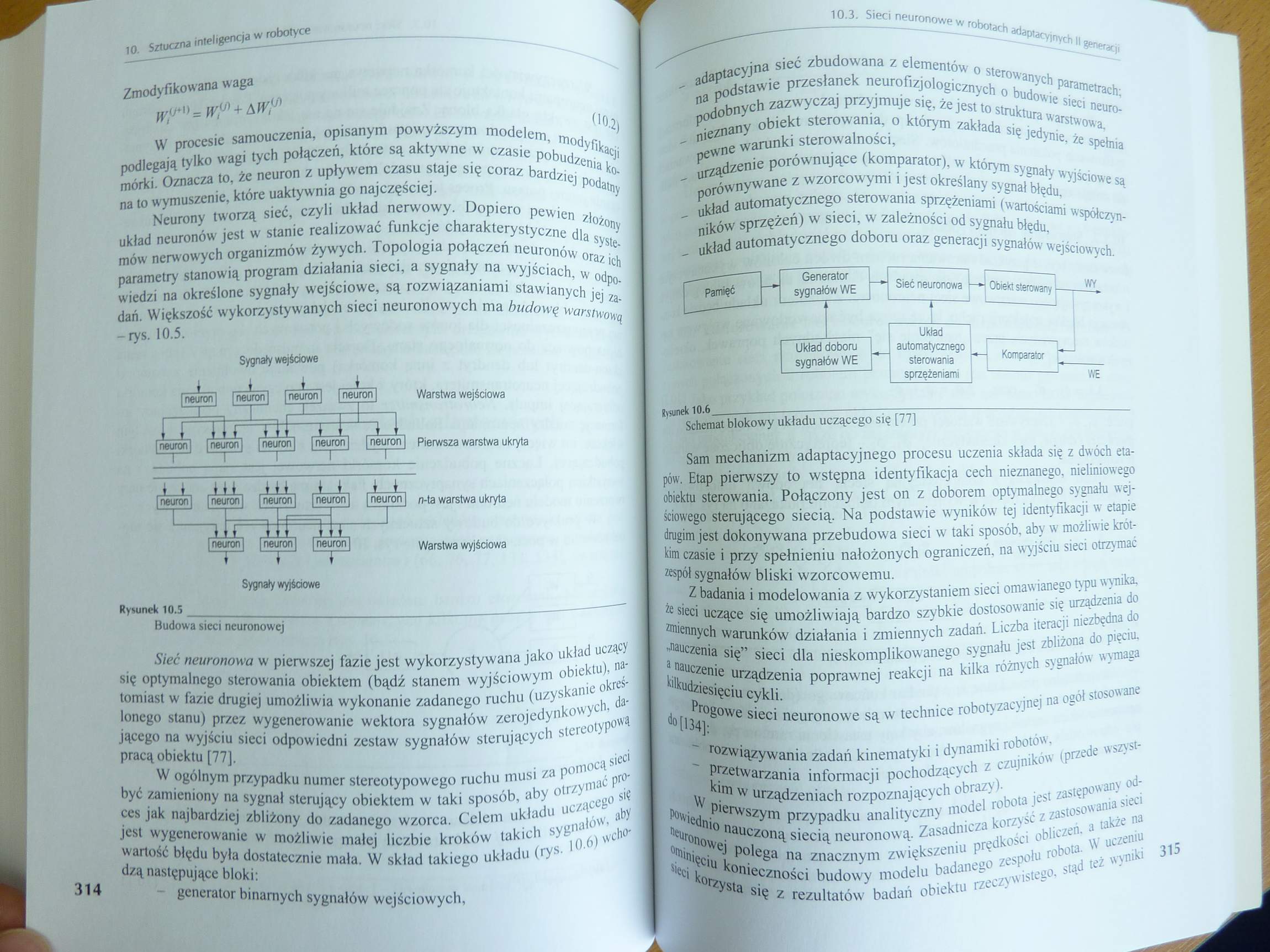
Neurony tworzą sieć, czyli układ nerwowy. Dopiero pewien złożony 1 układ neuronów jest w stanie realizować funkcje charakterystyczne dla syste- 1 mów nerwowych organizmów żywych. Topologia połączeń neuronów oraz ich 1 parametry stanowią program działania sieci, a sygnały na wyjściach, w odpo-1 wiedzi na określone sygnały wejściowe, są rozwiązaniami stawianych jej zadań. Większość wykorzystywanych sieci neuronowych ma budową warstwową -rys. 10.5.
Sygnały wejtóowe
| neuron | | neuron | | neuron ] | neuron
neuron
Warstwa wejśdowa Pierwsza warstwa ukryta
[neuron 1 |neuron) |neuron| jneuron) 1 neuron\ n-ta warstwa ukryta
r---. r-lL
|neuron| |neuron| | neuron 1 Warstwa wyjściowa
Sygnały wyjtóowe
Rysunek 10.5 __________
Budowa sieci neuronowej
Sieć neuronowa w pierwszej fazie jest wykorzystywana jako układ u się optymalnego sterowania obiektem (bądź stanem wyjściowym obiekt' tomiasl w fazie drugiej umożliwia wykonanie zadanego ruchu (uzyskanie lonego stanu) przez wygenerowanie wektora sygnałów zerojedynkowa jącego na wyjściu sieci odpowiedni zestaw sygnałów sterujących stete pracą obiektu [77].
W ogólnym przypadku numer stereotypowego ruchu musi za por być zamieniony na sygnał sterujący obiektem w taki sposób, aby otrzl ces jak najbardziej zbliżony do zadanego wzorca. Celem układu ud jesl wygenerowanie w możliwie małej liczbie kroków takich syd wartość błędu była dostatecznie mała. W skład takiego układu (rys. dzą następujące bloki:
314 - generator binarnych sygnałów wejściowych,
_ adaptacyjna sieć zbudowana z elementów o sterowanych parametrach; na podstawie przesłanek neurofizjologicznych o budowie sieci neuro-podobnych zazwyczaj przyjmuje się, że jest to struktura warstwowa,
> nieznany obiekt sterowania, o którym zakłada się jedynie, że spełnia pewne warunki sterowalności,
„ urządzenie porównujące (komparator), w którym sygnały wyjściowe są porównywane z wzorcowymi i jest określany sygnał błędu,
- układ automatycznego sterowania sprzężeniami (wartościami współczynników sprzężeń) w sieci, w zależności od sygnału błędu,
- układ automatycznego doboru oraz generacji sygnałów wejściowych.

tyuneklO.^______
Schemat blokowy układu uczącego się [77]
Sam mechanizm adaptacyjnego procesu uczenia składa się z dwóch etapów. Etap pierwszy to wstępna identyfikacja cech nieznanego, nieliniowego obiektu sterowania. Połączony jest on z doborem optymalnego sygnału wejściowego sterującego siecią. Na podstawie wyników tej identyfikacji w etapie drugim jest dokonywana przebudowa sieci w taki sposób, aby w możliwie krótkim czasie i przy spełnieniu nałożonych ograniczeń, na wyjściu sieci otrzymać zespół sygnałów bliski wzorcowemu.
Z badania i modelowania z wykorzystaniem sieci omawianego typu wynika, że sieci uczące się umożliwiają bardzo szybkie dostosowanie się urządzenia do zmiennych warunków działania i zmiennych zadań. Liczba iteracji niezbędna do jiauczenia się” sieci dla nieskomplikowanego sygnału jest zbliżona do pięciu, a nauczenie urządzenia poprawnej reakcji na kilka różnych sygnałów wymaga kilkudziesięciu cykli.
Progowe sieci neuronowe są w technice robotyzacyjnej na ogół stosowane do [134]:
- rozwiązywania zadań kinematyki i dynamiki robotów,
- przetwarzania informacji pochodzących z czujników (przede wszystkim w Urządzeniach rozpoznających obrazy).
W pierwszym przypadku analityczny model robota jest zastępowany od-P°wiednio nauczoną siecią neuronową. Zasadnicza korzyść z zastosowania sieci tronowej polega na znacznym zwiększeniu prędkości obliczeń, a także na Ginięciu konieczności budowy modelu badanego zespołu robota. W uczeniu eci korzysta się z rezultatów badań obiektu rzeczywistego, stąd też wyniki 315
Wyszukiwarka
Podobne podstrony:
74879 P1080341 10. Sztuczna inteligencja w robotyce 10. Sztuczna inteligencja w robotyce Nowe wagi k
więcej podobnych podstron