Mechanika11
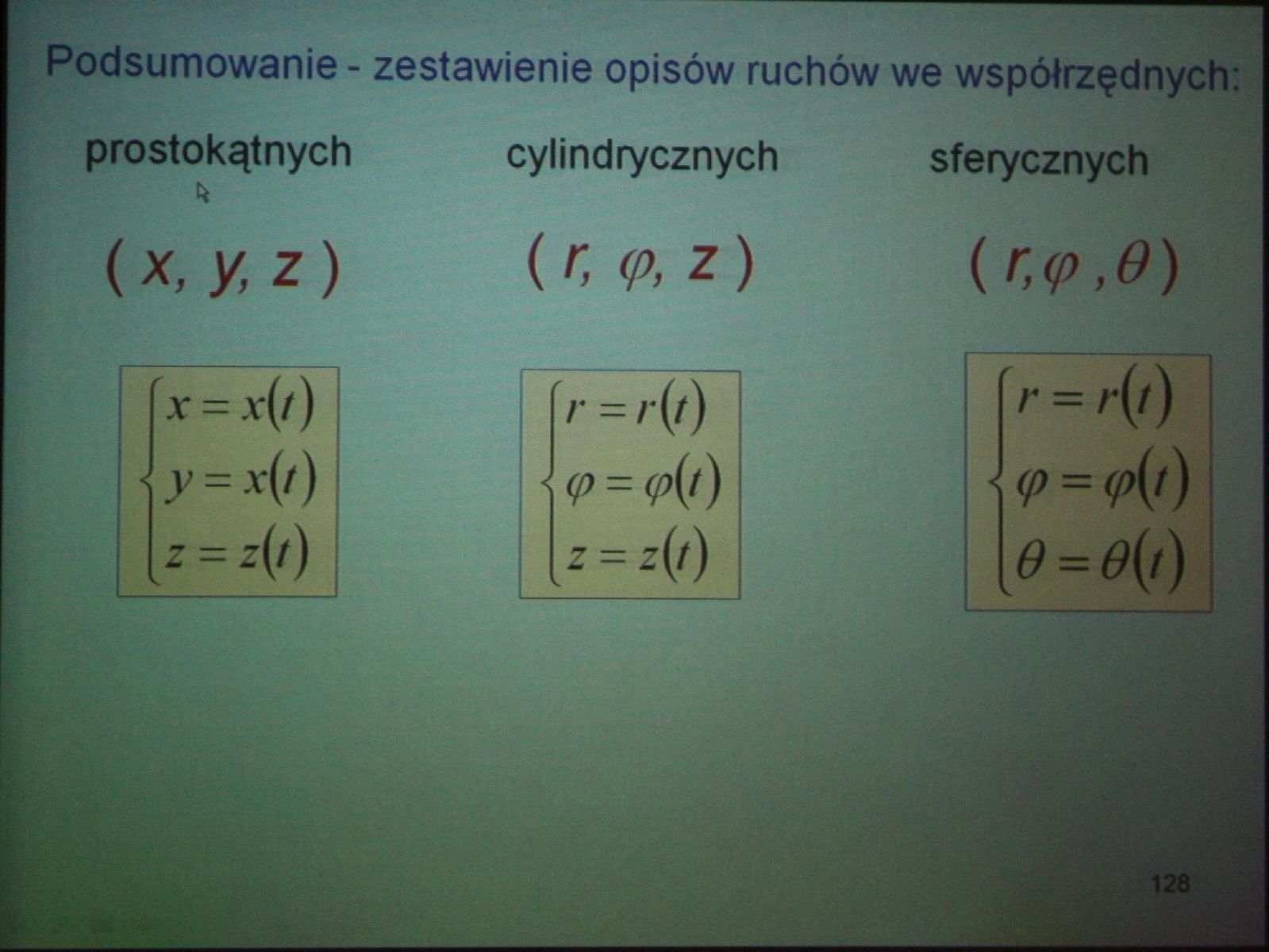
Podsumowanie - zestawienie opisów ruchów we współrzędnych:
[*=*(') [z = z(l)
\r=r(>)
prostokątnych
(*, y z) cylindrycznych
(r, ę, z) sferycznych
(r.ę,Ą
[r = /■(<) ■<p = ę(t)
l#il
Wyszukiwarka
Podobne podstrony:
35610 Mechanika24 Podsumowanie - zestawienie opisów ruchów we współrzędnych: prostokątnych cylindryc
36678 Mechanika53 Podsumowanie -prostokątnych ?*■ z z-z zestawienie opisów ruchów we współrzędny^ cy
Mechanika00 Kinematyka punktu. Ruch punktu zadany we współrzędnych prostokatiiMlMH Ruch punktu w
Mechanika03 Ruch punktu można również zapisać za pomocą wektora iiomienia wodzącego (we współrzędnyc
egzamin1 (3) Zestaw 200$p2 Konwersja energii 1. Narysować we współrzędnych p-V i T-s obiegi Carnota,
mechanika70 Ruch krzywoliniowy punktu na płaszczyźnie opisuje się we współrzędny tli kartczjaiiskich
Mechanika04 Ruch zadany we współrzędnych prostokątnych - c.d. Wartość wektora prędkości: ■p
pytania do powtórek i na 2 termin egzaminu Zestaw 1 . 1. Rodzaje
więcej podobnych podstron