mechanika70
Ruch krzywoliniowy punktu na płaszczyźnie opisuje się we współrzędny tli kartczjaiiskich. biegunowych lub naturalnych.
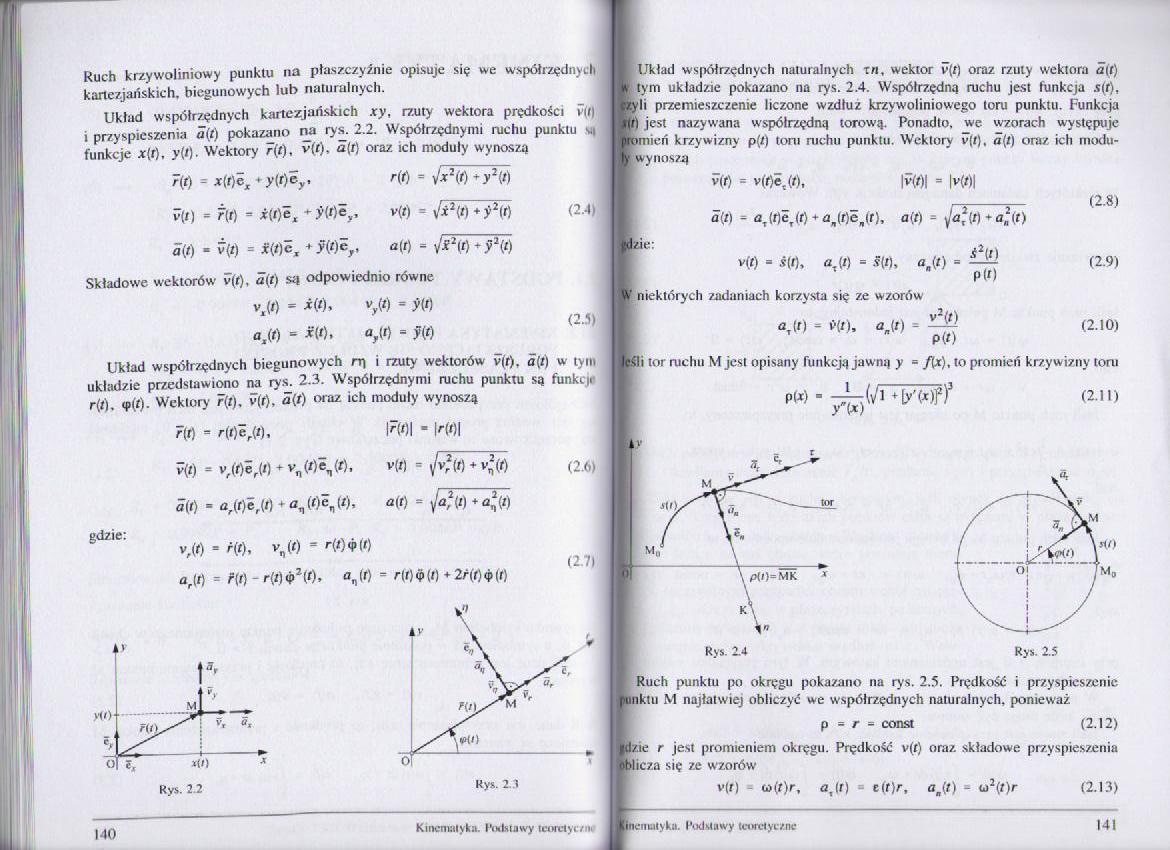
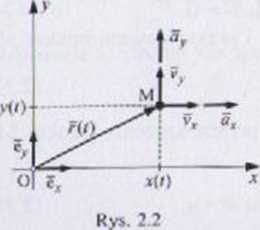
Układ współrzędnych kartezjańskich xy, rzuty wektora prędkości ńł) i przyspieszenia a(t) pokazano na rys. 2.2. Współrzędnymi ruchu punktu s* funkcje x{t), y(t). Wektory r(t), v(f), a[t) oraz ich moduły wynoszą
'■(O = v'*2(0 +y2(/)
7(t) = x(t)ex ♦ y(r)ey* v{t) = r[t) = x(t)et +y{t)ćy, v(t) = \'x2(t)+y2{t)
(2.4)
a(t) • v(/) = *(/)c, ■* y(r)e/t a{t) = \X2{t)*y2(t)
Składowe wektorów v(r), a{t) są odpowiednio równe
v,(/) * m* vy(t) = m
ajt) Ł x(t), ay{t) = y(t)
Układ współrzędnych biegunowych ni i rzuty wektorów v(r). a(t) w tym układzie przedstawiono na rys. 2.3. Współrzędnymi ruchu punktu są funkc • r(/). <p(r). Wektory r(/), v(t), a(t) oraz ich moduły wynoszą
r(r) = r(/)er(/), |r(r)| - |r(f)|
v(/) = v (r)er(/) * vn(/)en(r), v(/) = y/v2(r) ♦ v2(r)
(2.5)
gdzie:
fl(0 - a,(i)e,(i) ♦ (0e„ (/), a(t) = y^fi) ♦ **(/)
v,(r) - r(t), vn(0 « r(l)<p(f)
ar{t) = r(f) - r(/)<jr (f), «n(r) = r(t)$(i) ♦ 2r(r)<p|f)
(2.7)

140
Kmcnalyfca. 1'mlsuwy tenretyem
Układ współrzędnych naturalnych tri, wektor v(t) oraz rzuty wektora a(t) K tym układzie pokazano na rys. 2.4. Współrzędną ruchu jest funkcja s(f), ttyli przemieszczenie liczone wzdfuz krzywoliniowego toru punktu. Funkcja j(r) jest nazywana współrzędną torową. Ponadto, we wzorach występuje mień krzywizny p(t) tom ruchu punktu. Wektory v[t), a(t) oraz ich modu-p wynos/Jł
v(r) = v(r)et(r), |v(r)| = |v(r)|
a{t) - ax{t)er(t) ♦ aJt)eH(t), aft) = y'at:(r) ♦ a2(t)
i2[t)
(2.8)
Izie:
(29)
P(f)
v(r) - i(l), ax[t) = s(t)y aa(t)
A niektórych zadaniach korzysta się ze wzorów
(2.10)
V“(f )
<M'> = W). am(t) = ±22
P(0
lośli tor ruchu M jest opisany funkcją jawną y = /(*), to promień krzywizny tom

Rys. 14
PM - * b'(*)f)' (2.11)

Rys. 2.5
Ruch punktu po okręgu pokazano na rys. 2.5. Prędkość i przyspieszenie punktu M najłatwiej obliczyć we współrzędnych naturalnych, ponieważ
p = r = consi (2.12)
r.ie r jest promieniem okręgu. Prędkość v(f) oraz składowe przyspieszenia liczą się ze wzorów
v(f) - a>(f)r, «f(r) = e(f)r, ajt) * u2(t)r (2.13)
141
h' rnutyka. Podstawy teoretyczne
Wyszukiwarka
Podobne podstrony:
DSC01266 Zad. 1. Ruch punktu na płaszczyźnie opisują równania: —> x=V*t Wyznacz
mechanika82 Zadanie 2.5 Ruch punktu na płaszczyźnie jest opisany przez współrzędne x(f) = -2cos5r, y
MechanikaA7 y Rozpatrujemy ruch rzutu punktu P na średnicę koła, np. ruch punktu M wzdłuż osi y. y =
Image06 (3) 10 1.19. Ruch punktu na płaszczyźnie dany jest równaniami = bt2, y = ct2, układzie
Image06 10 1.19. Ruch punktu na płaszczyźnie dany jest równaniami: x — ht2, y = ct2, gdzie b i c są
Mechanika26 RUCH KRZYWOLINIOWY JEDNOSTAJNY Przyspieszenie:v = constAv a = lim— Kierunek wektora przy
Mechanika27 RUCH KRZYWOLINIOWY ZMIENNY przyspieszenie normalne: Przyspieszenie. A B , v iian =■a-
Slajd8 Figura plaska reprezcntyjąca ruch ciała sztywnego na płaszczyźnie ma trzy stopnie swobody. 8
63 (142) a płaszczyzną tarczy-suwaka, na ściance umieszcza się ramkę blaszaną, powleczoną cyną lutow
156 Geometria analityczno W przestrzeni n) punktu O = (0,0,0) na płaszczyznę r : x - 2* + 8 = 0; b)
Mechanika25 RUCH KRZYWOLINIOWY Wektor prędkości w każdym punkcie styczny do toru. v=const - ruch krz
STATYKA Przykładowe pytania egzaminacyjne Zdefiniować momen* siły względem punktu na płaszczyźnie
więcej podobnych podstron