silowniki�3
dla dużych siłowników (o skokach powyżej 100 [mm^J) ,
przy długości linii pneumatycznej przesyłowej powyżej 50 [m] ,
przy stosowaniu siłownika do sterowanie zaworem trójdrożnym,
- w układach blokad, gdzie Wymagana jest duża szybkość działania siłownika,
- przy zmianach przepływu medium lepkiego lub silnie zanieczyszczonego (osadzanie się zanieczyszczeń w-gnieździć zaworu),
- przy nastawianiu przepływu medium o temperaturze roboczej wyższej od 450 [k] lub niższej od 255 (XI»
- gdy zakres sprężyny siłownika nie odpowiada zakresowi sygnału sterującego,
- w układach regulacji z regulatorem elektronicznym i siłownikiem pneumatycznym (pozycjoner z wejściem stałoprądowym zamiast przetwornik elektro-pneumatyczny).
3. Siłowniki elektryczne
Siłowniki elektryczne stosowane w układach automatycznej regulacji można podzielić na dwie zasadnicze grupy:
a) siłowniki stałoprędkościowe przeznaczone głównie do współpracy z regulatorami krokowymi (z regulatorami o wyjściu przekaźnikowym) ,
b) siłowniki zraiennóprędkośclowe umożliwiające poprzez odpowiedni sterownik współpracę z regulatorem ciągłym bądź realizujące ze wzmacniaczem mocy 1 elementami dynamicznymi strukturę tzw- regulatora powiązanego z częścią siłową, dysponującego sygnałem wyjściowym typu mechanicznego przemieszczenia wału siłownika.
Ogólnie wg PN-S2/M-42011 siłownik elektryczny to element wykonawczy układów sterowania napędzany silnikiem elektrycznym, przetwarzający energię elektryczną na mechaniczną i charakteryzujący się siłą lub momentem wyjściowym, wykorzystywanym do napędzania elementów nastawczych układów regulacji i sterowania przez odpowiednie przemieszczenia elementu wyjściowego.
Ponieważ do przestawiania elementów nastawczych (klap, zaworów itp.) potrzebne są duże siły przy stosunkowo niewielkich prędkościach, a silniki dysponują dużą prędkością kątową i małym momentem, istotnym elementem siłownika Jest przekładnia mechaniczna zmniejszająca prędkość kątową i zwiększająca moment uzyskiwany na wale wyjściowym urządzenia.
W siłownikach elektrycznych stosuje się głównie następujące typy przekładni mechanicznych":
- zębate: równoległe Jo zazębieniu zewnętrznym 1 wewnętrznym, ślimakowe (niska sprawność, ale samohamowność),
- gwintowe typu śruba - nakrętka (przekładnie śrubowe).
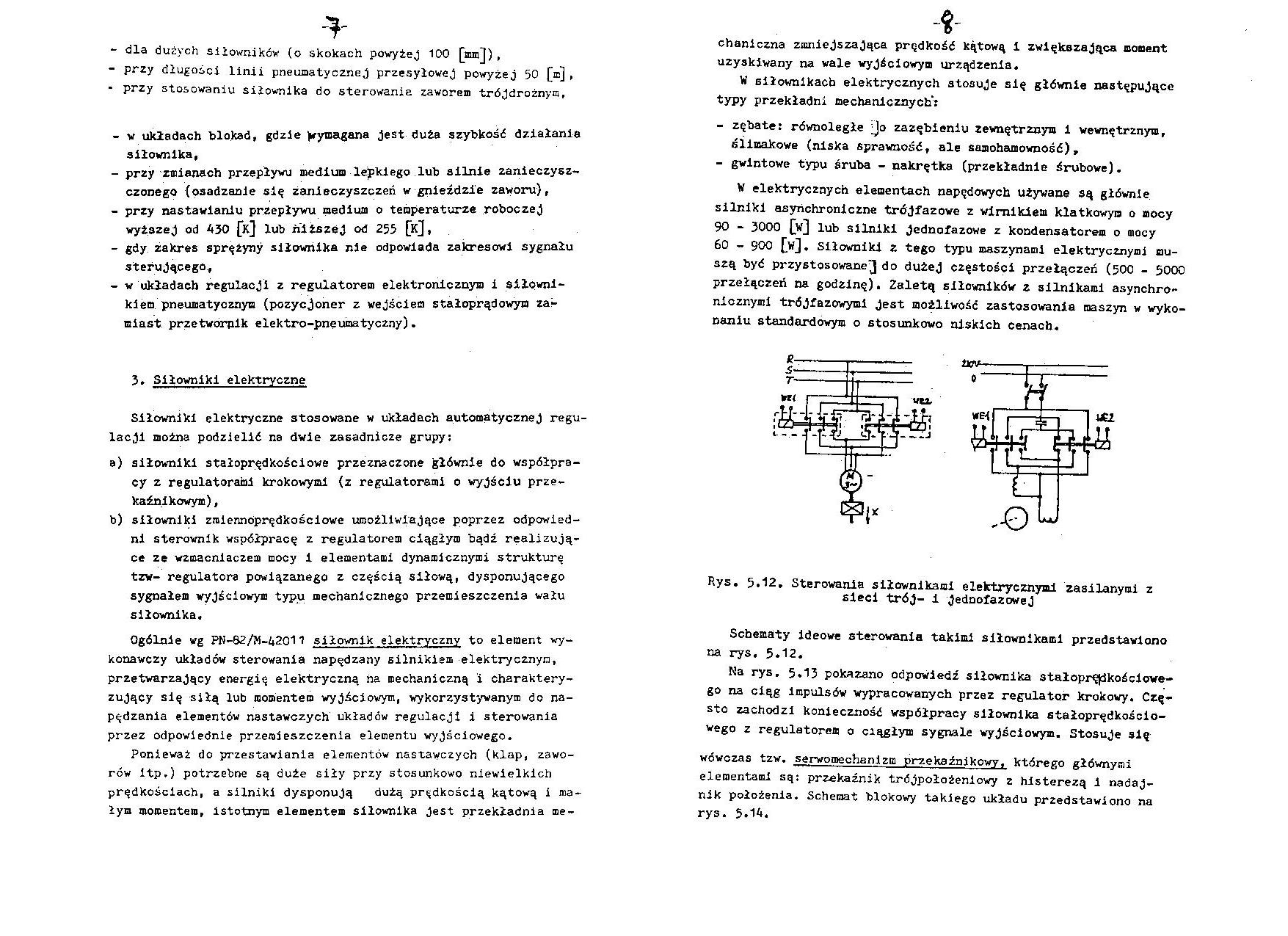
V elektrycznych elementach napędowych używane są głównie silniki asynchroniczne trójfazowe z wirnikiem klatkowym o mocy 90 - 3000 [w] lub silniki Jednofazowe z kondensatorem o mocy 60 - 900 JjrfJ. Siłowniki z tego typu maszynami elektrycznymi muszą byó przystosowanej do dużej częstości przełączeń (500 - 5000 przełączeń na godzinę). Zaletą siłowników z silnikami asynchronicznymi trójfazowymi Jest możliwość zastosowania maszyn w wykonaniu standardowym o stosunkowo niskich cenach.
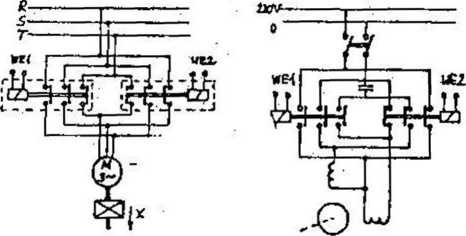
Rys. 5.12. Sterowania siłownikami elektrycznymi zasilanymi z sieci trój- i jednofazowej
Schematy ideowe sterowania takimi siłownikami przedstawiono na rys. 5.12.
Na rys. 5.13 pokazano odpowiedź siłownika stałoprępkościowe-go na ciąg Impulsów wypracowanych przez regulator krokowy. Często zachodzi konieczność współpracy siłownika stałoprędkośclo-wego z regulatorem o ciągłym sygnale wyjściowym. Stosuje się
wówczas tzw. serwomechanizm przekaźnikowy, którego głównymi elementami są: przekaźnik trćjpołożeniowy z histerezą 1 nadajnik położenia. Schemat blokowy takiego układu przedstawiono na rys. 5.14.
Wyszukiwarka
Podobne podstrony:
picture (15) (Large) C^fpaiB^S^iraię je*nowoczesną mrtcriąjąi i» nie dMwitikoidnąA gntoeaach {powyże
skanuj0026 (181) C. DLA KRÓLESTWA POLSKIEGO (GENERALNE GUBERNATORSTWO WARSZAWSKIE) 100 mm x 65 mm 12
75035 P1030809 mm ^/M-82054/19 i PN-82/M-82054/20. Dla nakrę-rk i gwintem powyżej M39 pozostałe wyma
43224 Rydzanicz (123) Tabela 14.5. Pasowania według zasady stałego otworu dla wymiarów powyżej 500
076 5 0,15 mm — dla średnic powyżej 65 mm. Należy pamiętać, że przy używanych cylindrach luz te
WYMIARY OSI OBCIĄŻĘNIA. 1,80 ••• ••• ••• ••• # I a - 100 mm dla kat. I j a =
P1040048 5.2.5. Pomiar średnicy otworu średnicówką mikrometryczną Dla średnic powyżej 50 mm stosuje
więcej podobnych podstron