skanuj0016 (51)
Wartość tego wskaźnika zależy od wielu czynników, głównie zaś od sposobu zamocowania zewnętrznego końca sprężyny oraz od lego, czy i czym posmarowano zwoje sprężyny [1,4].
10.3. PRZEDMIOT ĆWICZENIA I POMOCE
Przedmiotem ćwiczenia jest sprężyna napędowa w bębnie.
Pomocami wykorzystywanymi w ćwiczeniu sa:
- stanowisko zawierające przyrząd do wyznaczania charakterystyki sprężyny napędowej w bębnie wraz z układami pomiarowymi.
- instrukcja zawierająca parametry sprężyny, bębna i stanowiska,
- arkusz papieru do rejestratora.
10.3.1. Stanowisko do wyznaczania charakterystyki sprężyny napędowej w bębnie
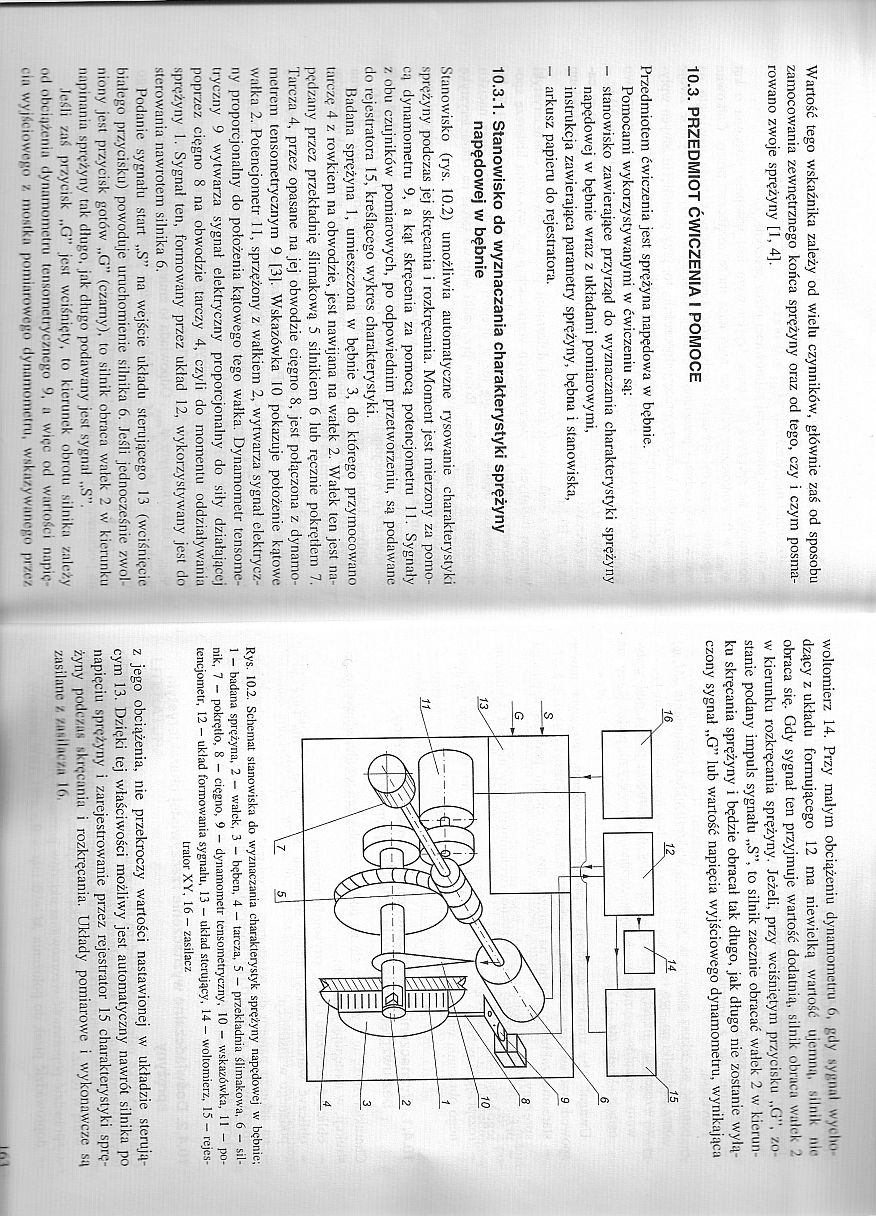
Stanowisko (rys. 10.2) umożliwia automatyczne rysowanie charakterystyki sprężyny podczas jej skręcania i rozkręcania. Moment jest mierzony za pomocą dynamometni 9, a kąt skręcenia za pomocą potencjometru 11. Sygnały z, obu czujników pomiarowych, po odpowiednim przetworzeniu, są podawane do rejestratora 15, kreślącego wykres charakterystyki.
Badana sprężyna I, umieszczona w bębnie 3, do którego przymocowano tarczę 4 z rowkiem na obwodzie, jest nawijana na wałek 2. Wałek ten jest napędzany przez przekładnię ślimakową 5 silnikiem 6 lub ręcznie pokrętłem 7. Tarcza 4, przez opasane na jej obwodzie cięgno 8, jest połączona z dynarno-metrem lensomctrycznym 9 [3], Wskazówka 10 pokazuje położenie kątowe walka 2. Potencjometr 11, sprzężony z wałkiem 2, wytwarza sygnał elektryczny proporcjonalny do położenia kątowego tego walka, Dynamometr tensomo-tryczny 9 wytwarza sygnał elektryczny proporcjonalny do siły działającej poprzez cięgno 8 na obwodzie tarczy 4, czyli do momentu oddziaływania sprężyny I. Sygnał ten, formowany przez układ 12, wykorzystywany jest do sterowania nnwrotcm silnika 6.
Podanie sygnału start „S" na wejście układu sterującego 13 (wciśnięcie białego przycisku) powoduje uruchomienie silnika 6. Jeśli jednocześnie zwolniony jest przycisk gotów „G" (czarny), to silnik obraca wałek 2 w kierunku napinania sprężyny tak długo, jak długo podawany jest sygnał „S".
Jeśli zaś przycisk „G" jest wciśnięty, to kierunek obrotu silnika zależy od obciążenia dynamometni tensometrycznogo 9, a więc od wartości nuplę-cln wyjściowego z mostku pomiarowego dyntunomelru, wskazywanego przez woltomierz 14. Przy małym obciążeniu dynumomelru 6. gdy sygnał wydm dzący z układu formującego 12 ma niewielką wartość ujemną, silnik nic obraca się. Gdy sygnał (en przyjmuje wartość dodatnią, silnik obrucn wałek .’ w kierunku rozkręcania sprężyny. Jeżeli, przy wciśniętym przycisku „Cl", zostanie podany impuls sygnału „S”, to silnik zacznie obracać wałek 2 w kierunku skręcania sprężyny i będzie obracał lak długo, jak długo nie zostanie wyłączony sygnał „G” lub wartość napięcia wyjściowego dynamometni, wynikająca
z jego obciążenia, nic przekroczy wartości nastawionej w układzie sterującym 13. Dzięki tej właściwości możliwy jest automatyczny nawrót silnika po napięciu sprężyny i zarejestrowanie przez rejestrator 15 charakterystyki sprężyny podczas skręcaniu i rozkręcania. Układy pomiarowe i wykonawcze są zasilano z raillłCM 16.
Wyszukiwarka
Podobne podstrony:
skanuj0006 (419) Grubość warstwy dyfuzyjnej zależy od koncentracji elektrolitów i wartościowości jon
pociągu dalekobieżnego. Rzeczywiste położenie tego punktu zależy od bardzo wielu czynników (organiza
4.2. Psychologiczna wartość stylu kierowania Psychologiczna wartość stylu kierowania zależy od tego,
34 Wartość przedsiębiorstwa siębiorstwa i nie zależy od sposobu ich finansowania.51 Oczywiście wnios
img250 Wartość oświetlenia naturalnego zależy od wielu czynników makroklimatycznych (szerokość geogr
barlik,nowak0016 2.2. Falowniki niezależne go. Wartość średnia tego prądu zależy od rodzaju odb
barlik,nowak0017 111 2.2. Falowniki niezależne go. Wartość średnia tego prądu zależy od rodzaju obci
„konserwatywny”. Wysoka wartość tego wskaźnika ogranicza w pewnym stopniu zyskowność majątku
skanuj0117 (6) 125 Charakter przedsiębiorstwa spółdzielczego zależy od typu spółdzielni oiaz od waru
skanuj0017 (166) . ODDZIAŁYWANIE (ciśnienie) STATYCZNE zależy od głębokości* wiązane jest z ciężarem
więcej podobnych podstron