IMG144
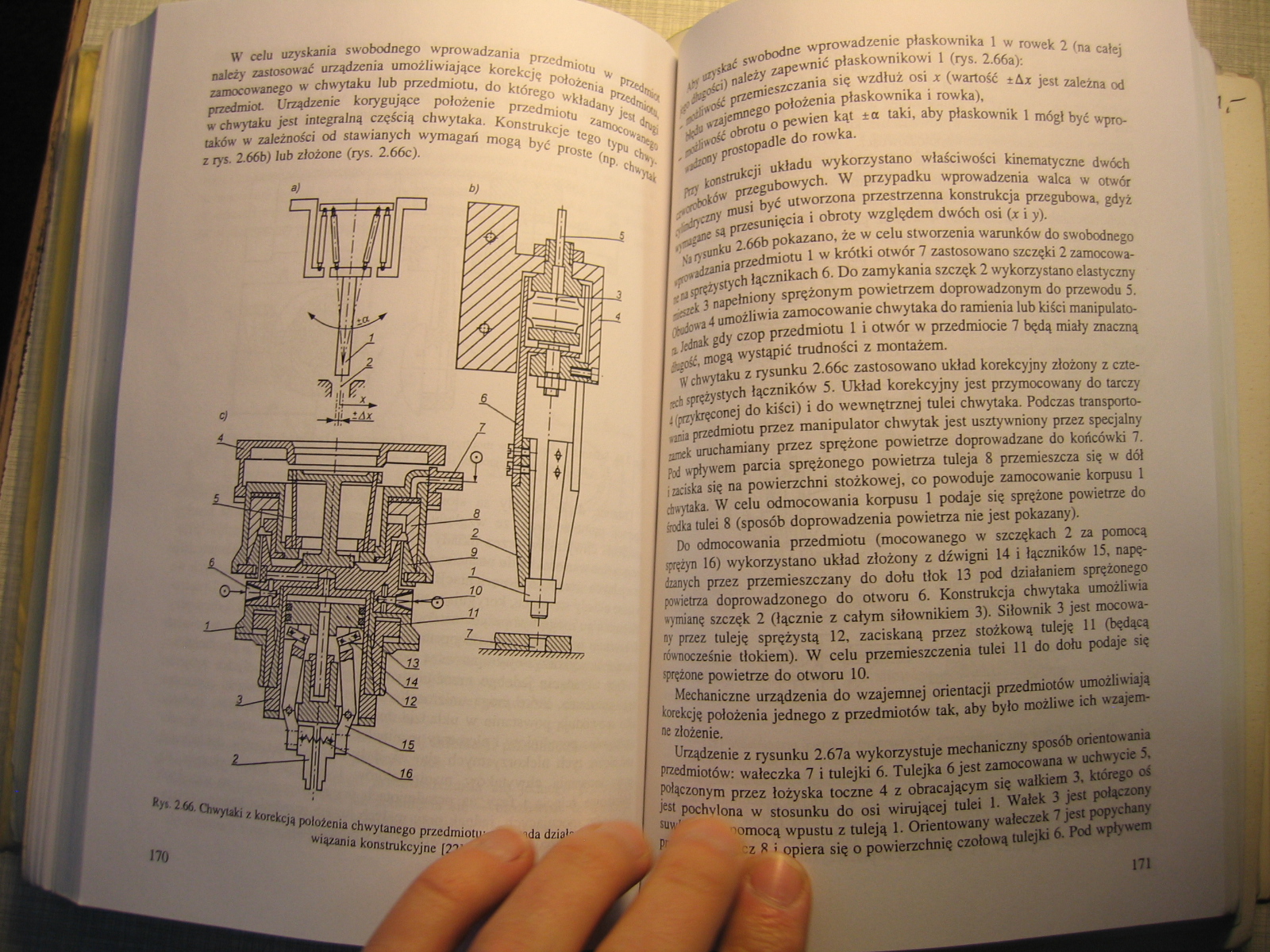
W celu uzyskania swobodnego wprowadzania przedmiotu w p_ należy zastosować urządzenia umożliwiające korekcję położenia zamocowanego w chwytaku lub przedmiotu, do którego wkładany je^1^ przedmiot. Urządzenie korygujące położenie przedmiotu zarnoc^ ^ w chwytaku jest integralną częścią chwytaka. Konstrukcje tego typy taków w zależności od stawianych wymagań mogą być proste (np. C^S-z rys. 2.6ób) lub złożone (rys. 2.66c). ^
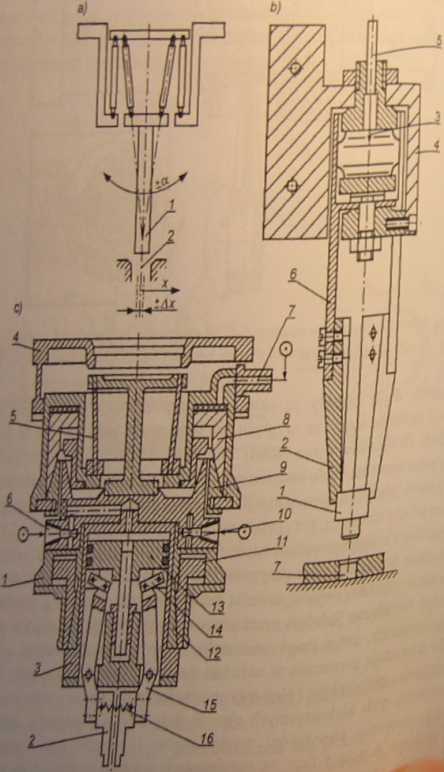
266. Chwytaki i korekcją po/oźcnia chwytanego przedmiotu.’ wiązania konstrukcyjne
ida&jś
suw
Pr
■L^ swobodne wprowadzenie płaskownika 1 w rowek 2 (na całej J^? !f«ci) należy zapewnić płaskownikowi 1 (rys. 2.66a):
^ JM# przemieszczania się wzdłuż osi x (wartość ±Az jest zależna od L^f ^junnego położenia płaskownika i rowka), łjrL# obrotu o pewien kąt to taki, aby płaskownik 1 mógł być wpro-r J^rooy prostopadle do rowka.
konstrukcji układu wykorzystano właściwości kinematyczne dwóch robotów przegubowych. W przypadku wprowadzenia walca w otwór fizyczny musi być utworzona przestrzenna konstrukcja przegubowa, gdyż [ są przesunięcia i obroty względem dwóch osi (x i y).
\j rysunku 2.66b pokazano, że w celu stworzenia warunków do swobodnego Ltfdzania przedmiotu 1 w krótki otwór 7 zastosowano szczęki 2 zamocowa-r^jptężystych łącznikach 6. Do zamykania szczęk 2 wykorzystano elastyczny Ijk 3 napełniony sprężonym powietrzem doprowadzonym do przewodu 5. bojowa 4 umożliwia zamocowanie chwytaka do ramienia lub kiści manipulato-n jednak gdy czop przedmiotu 1 i otwór w przedmiocie 7 będą miały znaczną cjość, mogą wystąpić trudności z montażem.
W chwytaku z rysunku 2.66c zastosowano układ korekcyjny złożony z czte-fd> sprężystych łączników 5. Układ korekcyjny jest przymocowany do tarczy 4 (przykręconej do kiści) i do wewnętrznej tulei chwytaka. Podczas transporto-unii przedmiotu przez manipulator chwytak jest usztywniony przez specjalny ainek uruchamiany przez sprężone powietrze doprowadzane do końcówki 7. tal wpływem parcia sprężonego powietrza tuleja 8 przemieszcza się w dół zaciska się na powierzchni stożkowej, co powoduje zamocowanie korpusu 1 chwytaka. W celu odmocowania korpusu 1 podaje się sprężone powietrze do środka tulei 8 (sposób doprowadzenia powietrza nie jest pokazany).
Do odmocowania przedmiotu (mocowanego w szczękach 2 za pomocą sprężyn 16) wykorzystano układ złożony z dźwigni 14 i łączników 15, napędzanych przez przemieszczany do dołu tłok 13 pod działaniem sprężonego powietrza doprowadzonego do otworu 6. Konstrukcja chwytaka umożliwia wymianę szczęk 2 (łącznie z całym siłownikiem 3). Siłownik 3 jest mocowany przez tuleję sprężystą 12, zaciskaną przez stożkową tuleję 11 (będącą równocześnie tłokiem). W celu przemieszczenia tulei 11 do dołu podaje się sprężone powietrze do otworu 10.
Mechaniczne urządzenia do wzajemnej orientacji przedmiotów umożliwiają korekcję położenia jednego z przedmiotów tak, aby było możliwe ich wzajemne złożenie.
Urządzenie z rysunku 2.67a wykorzystuje mechaniczny sposób orientowania przedmiotów: wałeczka 7 i tulejki 6. Tulejka 6 jest zamocowana w uchwycie 5, połączonym przez łożyska toczne 4 z obracającym się wałkiem 3, którego oś jest pochylona w stosunku do osi wirującej tulei 1. Wałek 3 jest połączony 'omocą wpustu z tuleją I. Orientowany wałeczek 7 jest popychany zz ft i opiera się o powierzchnię czołową tulejki 6. Pod wpływem
a
170
Wyszukiwarka
Podobne podstrony:
Metody nauczania W celu uzyskania oczekiwanych efektów kształcenia zostanie zastosowany hybrydowy sy
W celu wyprowadzenia wzoru na stalą E należy zastosować równanie Clauciusa-Clapeyrona w
Image438 uzyskania impulsów o takim czasie trwania należy zastosować elementy zewnętrzne: R — 10 MQ
W celu uzyskania przychodów ze sprzedaży towarów, należy te towary najpierw zakupić, a następnie spr
7. W oknie wpisz komendę: s w celu uzyskania informacji statusie połączenia z bazą danych. 8. Należy
s2 zad5 s2 stan u = 1; w celu obliczenia wartości momentów My należy określić przemieszczenia węzłów
W celu uzyskania pozwolenia lub dalszych informacji należy skontaktować się z: The ILAC Secretariat
3 07 KLIMATYZACJA (ciąg dalszy)B • Położenie CO W celu uzyskania większej skuteczności, należy
Rok I, semestr I Do zaliczenia I semestru należy uzyskać 6 punktów ECTS z przedmiotów do wyboru, tj.
test opiekun medyczny 15 4 Zadanie 11. W celu zmniejszenia obrzęku po stłuczeniu stopy należy zastos
s2 zad5 s2 stan u = 1; w celu obliczenia wartości momentów My należy określić przemieszczenia węzłów
CCF20111022�011 12.16.
Rozdział 2 W celu umożliwienia kampanijnej pracy żeliwiaka należy: zastosować materiały o odpowiedni
więcej podobnych podstron