P1080250
5. Sterowanie robotów przemysłowych
bliżu robota. Przy takim oprogramowaniu operator może obsługiwać magazyn w module podczas obróbki przedmiotu na obrabiarce. Dzięki zastosowaniu opro. gramowania DCS notuje się znaczący wzrost wydajności, oszczędności miejsca w hali produkcyjnej, elastyczność systemu i redukcję kosztów sprzętu.
5.6. Sterowanie robotów mobilnych
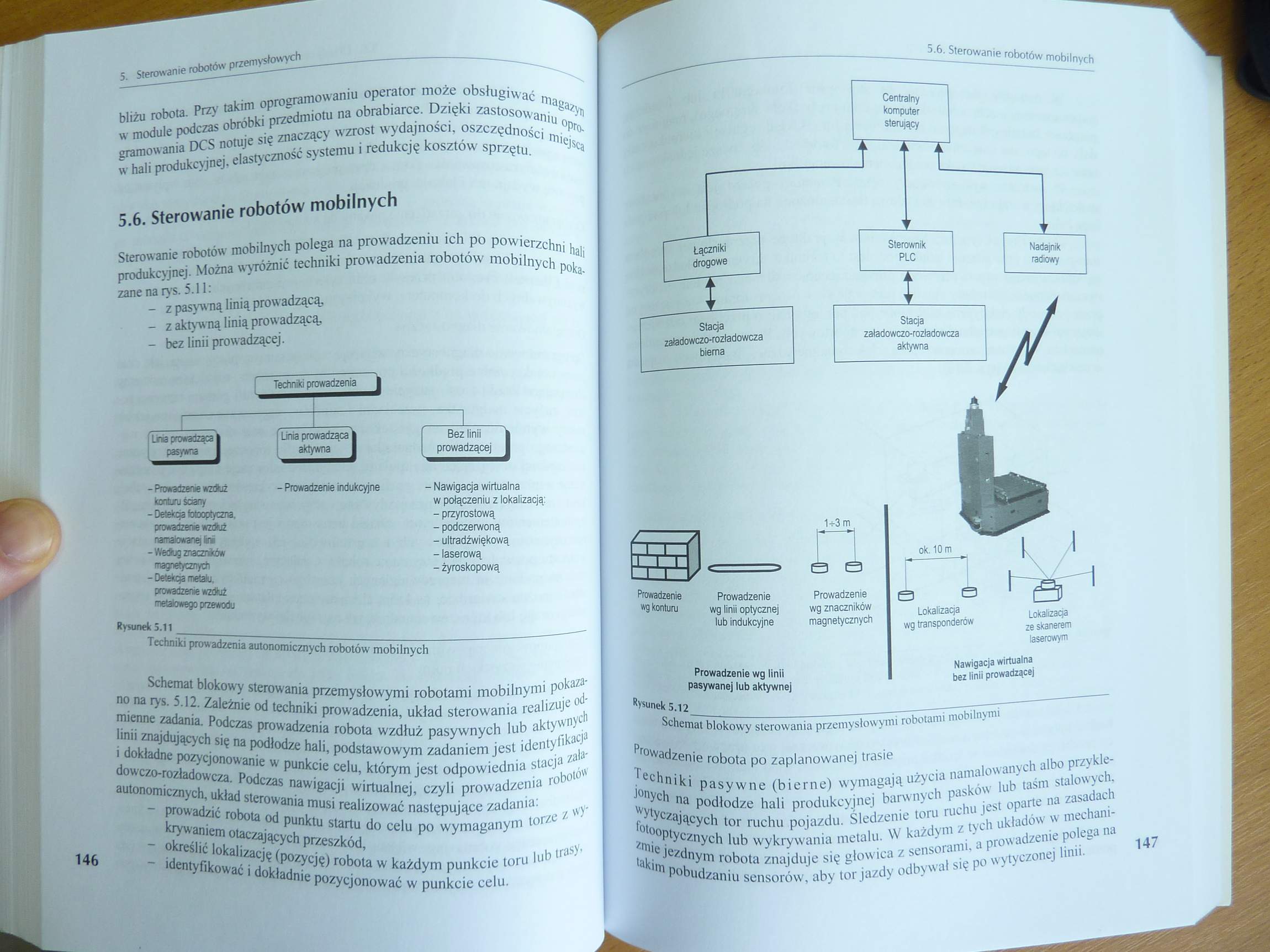
Sterowanie robotów mobilnych polega na prowadzeniu ich po powierzchni hali produkcyjnej. Można wyróżnić techniki prowadzenia robotów mobilnych poka-zane na rys. 5.11:
- z pasywną linią prowadzącą,
- z aktywną linią prowadzącą,
- bez linii prowadzącej.
[ Techniki prowadzenia
|
fliria prowadząca k |
Linia prowadząca^ |
Bez linii k |
|
1 pasywna 1 |
aktywna |
prowadzącej 1 |
|
- Prowadzenie wzdłuż |
- Prowadzenie indukcyjne |
- Nawigacja wirtualna |
|
konturu ściany |
w połączeniu z lokalizacją: | |
|
- Detekcja fbtooptyczna. |
- przyrostową | |
|
prowadzenie wziM |
- podczerwoną | |
|
namalowanej fini |
-ultradźwiękową | |
|
-Według znaczników |
- laserową | |
|
magnetycznych |
-żyroskopową | |
|
-Detekcja metalu. | ||
|
prowadzenie wzdłuż | ||
|
metalowego przewodu |
Rysunek S.l|*j pfy* ' 1 -_
Techniki prowadzenia autonomicznych robotów mobilnych
Schemat blokowy sterowania przemysłowymi robotami mobilnymi pokazano na rys. 5.12. Zależnie od techniki prowadzenia, układ sterowania realizuje odmienne zadania. Podczas prowadzenia robota wzdłuż pasywnych lub aktywnych linii znajdujących się na podłodze hali, podstawowym zadaniem jest identyfikacja i dokładne pozycjonowanie w punkcie celu, którym jest odpowiednia stacja zala-dowczo-rozladowcza. Podczas nawigacji wirtualnej, czyli prowadzenia robotów autonomicznych, układ sterowania musi realizować następujące zadania:
- prowadzić robota od punktu startu do celu po wymaganym torze z wykrywaniem otaczających przeszkód,
- określić lokalizację (pozycję) robota w każdym punkcie toru lub trasy,
- identyfikować i dokładnie pozycjonować w punkcie celu.
Centralny
komputer
sterujący
H U
Sterownik
PLC
Nadajnik
radiowy
Łączniki
drogowe
|
1r | ||
|
Stacja |
Stacja | |
|
zaladowczo-rozładowcza |
zaladowczo-rozładowcza | |
|
bierna |
aktywna | |

1-i-3 m
n
Prowadzenie Prowadzenie wg konturu wg linii optycznej lub indukcyjne
Q O
Prowadzenie wg znaczników magnetycznych
Q Q
Lokalizacja wg transponderów
Nawigacja wirtualna bez linii prowadzącej
Prowadzenie wg linii pasywanej lub aktywnej
Rysunek 5.^_
Schemat blokowy sterowania przemysłowymi robotami mobilnymi
Prowadzenie robota po zaplanowanej trasie
Techniki pasywne (bierne) wymagają użycia namalowanych albo przyklejonych na podłodze hali produkcyjnej barwnych pasków lub taśm stalowych, wytyczających tor ruchu pojazdu. Siedzenie toru ruchu jest oparte na zasadach fotooptycznych lub wykrywania metalu. W każdym z tych układów w mechanizmie jezdnym robota znajduje się głowica z sensorami, a prowadzenie polega na takim pobudzaniu sensorów, aby tor jazdy odbywał się po wytyczonej linii.
Wyszukiwarka
Podobne podstrony:
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
P1080241 5. Sterowanie robotów przemysłowych Rysunek S.4_____ Klasyfikacja układów sterowania robotó
55128 P1080239 5. Sterowanie robotów przemysłowych hiperbola, elipsa). Przeznaczona jest szczególnie
18650 P1080275 Niapędy robotów przemysłowych wowym wymaganiem przy wykorzystaniu źródła cieczy roboc
więcej podobnych podstron