18650 P1080275

Niapędy robotów przemysłowych
wowym wymaganiem przy wykorzystaniu źródła cieczy roboczej do napę^ robota jest stabilizacja ciśnienia w obwodzie hydraulicznym. W przypadku na. pędu robotów szczególnie niekorzystna jest skokowa zmiana zewnętrznej momentu statycznego, spow odowana nagłą zmianą obciążenia.
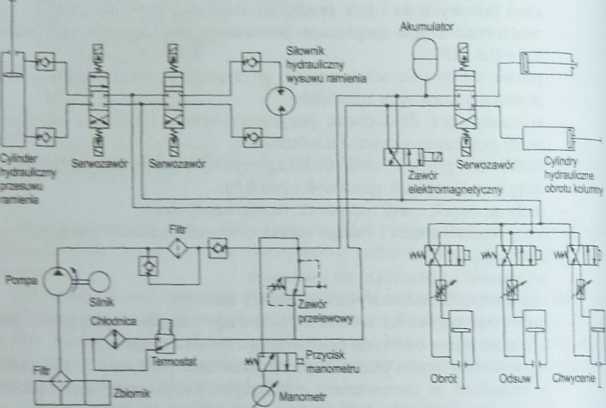
Schcma kydrasbcznY robota (Yezsatran) [14]
_ I
Analiza różnych możliwych wariantów napędu hydraulicznego robota w skazuje na przydatność w spólnego zasilacza hydraulicznego do napędów we 1 wszystkich osiach. Jego zaletą jest prosta konstrukcja, wadami zaś: wzajemne I oddziaływanie silników hydraulicznych przy pracy z niejednakowymi prędko-1 ściami. niestałość charakterystyk napędu i konieczność dławienia cieczy. Powo- I duje to straty mocy zespołu napędowego i nagrzewanie się układu napędowego I i otaczającego środowiska.
W pokazanym na rys. 7.8 przykładzie pompa zębata napędzana silnikiem elektrycznym dostarcza olej pod ciśnieniem 6,8 MPa. którego dopływem do poszczególnych silników hydraulicznych sterują serwozawory. Olej jest tiltro-wany zestawem filtrów. Ze zbiornika przechodzi on przez filtr wyjściowy do pompy zębatej, a dalej do filtru wysokociśnieniowego z wymienną wkładką filtracyjną. W kadłubie filtra wysokociśnieniowego jest wbudowany zawór zwrotny, uniemożliwiający powrotny przepływ- oleju po odłączeniu układu. gd)i, mogłoby to spowodow ać uszkodzenie elementu filtracyjnego. Prze filtrow any 196 olej przechodzi do rurociągu rozprowadzającego, składającego się z regulatora

ciśnienia serwozaworu obrotu, zaworu bezpieczeństw a sterowanego ciśnieniem, jititftulatora i elektromagnetycznego zaworu bezpieczeństwa i następnie jest Naprowadzony do wszystkich części robota przemysłowego. Wymiennik ciepła jot ibodowany jak chłodnica z regulatorem temperatury oleju. Regulator temperatury powoduje odprowadzenie oleju o temperaturze niższej od ustawionej (tutaj 55°C> z powrotem do zbiornika olejowego, natomiast oleju o wyższej temperaturze do chłodnicy. Regulator ciśnienia utrzymuje stałą wartość ciśnienia oleją i.rdtaj 6.8 MPaj. Akumulator przyłączony do rurociągu rozprowadzającego i ogia-niczający wahania ciśnienia oleju doprowadzanego przez pompę zębatą ma po-emność 11 i jest napełniony azotem o ciśnieniu 5.5 MPa.
W nowoczesnych układach zasilaczy hydraulicznych stosuje się regulowaną pompę hydrauliczną z automatyczną regulacją wy datku i tym samym ciś-ciesaia. Układ taki. w przypadku gdy napędy robota są nieruchome, tzn. gdy cUooność oleju jest zerowa, automatycznie zmniejsza wydatek pompy, aby snmimalizować straty energetyczne na przepompowywanie oleju przez zawór przelewowy.
Do bezpośredniego sterowania silnikiem hydraulicznym służą wzmacniacze (serwozawory). które umożliwiają uzyskanie określonych przez pro-sam położeń organu wykonawczego robota. Istotą działania wzmacniacza jest możliwość sterowania przepływem strumienia oleju o dużej mocy hydraulicznej za pomocą słabych sygnałów elektrycznych. Serwozawory używane w konstrukcjach robotów mają stałą wartość straty ciśnienia i z reguły są czterokrawę-ćziowe. Serw ozawory są przewidziane do pracy w zamknięty ch pętlach w układach ze sprzężeniem położeniowym i prędkośćiowym.
W celu zilustrowania działania na rys. 7.9 pokazano wzmacniacz ekktro-lydraułiczny suwakowy jednostopniowy.
Elementem sterującym przepływem oleju przez silnik hydrauliczny jest arnik czterokrawędziowy ly stanowiący zarazem rdzeń przyciągany przeciw-soboie przez dwa elektromagnesy 2 i j. Aby zmniejszyć w jak największYm stopniu opory tarcia ślizgow ego, suw ak sterujący jest prowadzony w tuki na
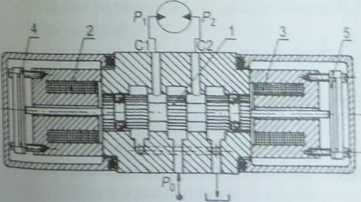

suwak owota*’
Wyszukiwarka
Podobne podstrony:
P1080250 5. Sterowanie robotów przemysłowych bliżu robota. Przy takim oprogramowaniu operator może o
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
P1080211 3. Budowa robotów przemysłowych wymiarowej przestrzeni, określonej przez trzy osie X, Y, Z,
P1080264 6. Programowanie robotów przemysłowych gólnych jego elementów, oferując przy tym narzędzie
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
P1080256 6. Programowanie robotów przemysłowych Rysunek 63 _ Schemat zestykowy pro
P1080281 7. Napędy robotów przemysłowych - wirniki silników prądu przemiennego maj
P1080285 7. Napędy robotów przemysłowych 7. Napędy robotów przemysłowych VII III V Rysunek
P1080294 6. Etektory robotów przemysłowych spieszeń. Poprawne uchwycenie oznacza unieruchomienie obi
więcej podobnych podstron