P1080211
3. Budowa robotów przemysłowych
wymiarowej przestrzeni, określonej przez trzy osie X, Y, Z, przy czym platforma wykonuje ruchy równoległe do płaszczyzny XY i nie obraca się wokół osi prostopadłej do tej płaszczyzny - osi Z. Obrót chwytaka jest możliwy dzięki silnikowi zamocowanemu na podstawie i połączonemu z członem roboczym za pomocą teleskopowego wałka z dwoma przegubami krzyżakowymi.
Rysunek~ .. .._
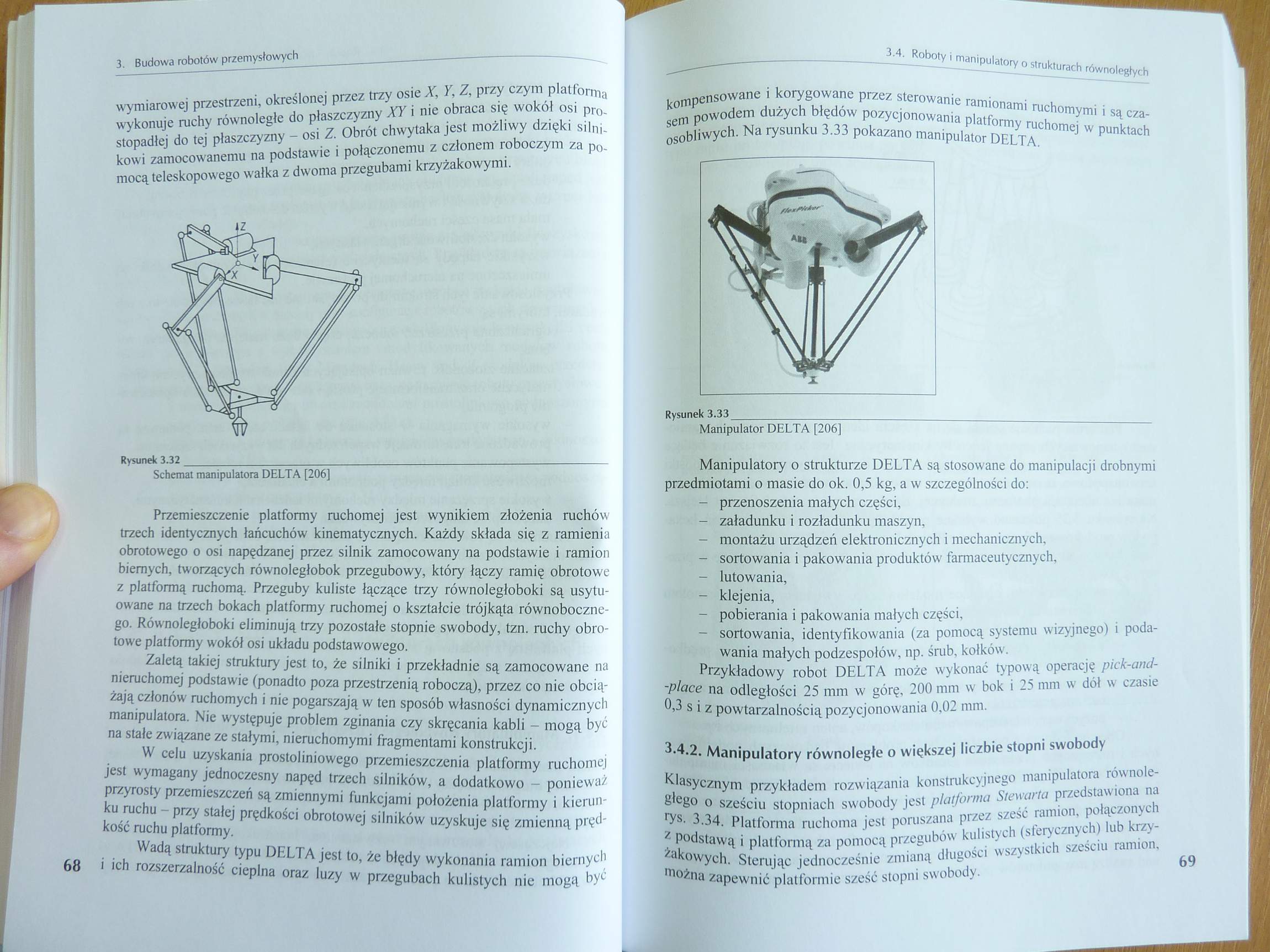
Schemat manipulatora DELTA [206]
Przemieszczenie platformy ruchomej jest wynikiem złożenia ruchów trzech identycznych łańcuchów kinematycznych. Każdy składa się z ramienia obrotowego o osi napędzanej przez silnik zamocowany na podstawię i ramion biernych, tworzących równoległobok przegubowy, który łączy ramię 'Obrotowe z platformą ruchomą. Przeguby kuliste łączące trzy równoległoboki są usytuowane na trzech bokach platformy ruchomej o kształcie trójkąta równobocznego. Równoległoboki eliminują trzy pozostałe stopnie swobody, tzn. ruchy obrotowe platformy wokół osi układu podstawowego.
Zaletą takiej struktury jest to, że silniki i przekładnie są zamocowane na nieruchomej podstawie (ponadto poza przestrzenią roboczą), przez co nie obciążają członów ruchomych i nie pogarszają w ten sposób własności dynamicznych manipulatora. Nie występuje problem zginania czy skręcania kabli - mogą być na stałe związane ze stałymi, nieruchomymi fragmentami konstrukcji.
W celu uzyskania prostoliniowego przemieszczenia platformy ruchomej jest wymagany jednoczesny napęd trzech silników, a dodatkowo - ponieważ przyrosty przemieszczeń są zmiennymi funkcjami położenia platformy i kierunku ruchu - przy stałej prędkości obrotowej silników uzyskuje się zmienną prędkość ruchu platformy.
Wadą struktury typu DELTA jest to, że błędy wykonania ramion biernych 68 i ich rozszerzalność cieplna oraz luzy w przegubach kulistych nie mogą być
kompensowane i korygowane przez sterowanie ramionami ruchomymi i są czasem powodem dużych błędów pozycjonowania platformy ruchomej w punktach osobliwych. Na rysunku 3.33 pokazano manipulator DELTA.

Rysunek 3^______
Manipulator DELTA [206]
Manipulatory o strukturze DELTA są stosowane do manipulacji drobnymi przedmiotami o masie do ok. 0,5 kg, a w szczególności do:
— przenoszenia małych części,
— załadunku i rozładunku maszyn,
- montażu urządzeń elektronicznych i mechanicznych,
• — sortowania i pakowania produktów farmaceutycznych,
— lutowania,
' - klejenia,
- pobierania i pakowania małych części,
- sortowania, identyfikowania (za pomocą systemu wizyjnego) i podawania małych podzespołów, np. śrub, kołków.
Przykładowy robot DELTA może wykonać typową operację pick-and--place na odległości 25 mm w górę, 200 mm w bok i 25 mm w dół w czasie 0,3 s i z powtarzalnością pozycjonowania 0,02 mm.
3.4.2. Manipulatory równoległe o większej liczbie stopni swobody
Klasycznym przykładem rozwiązania konstrukcyjnego manipulatora równoległego o sześciu stopniach swobody jest platforma Stewarta przedstawiona na rys. 3.34. Platforma ruchoma jest poruszana przez sześć ramion, połączonych z podstawą i platformą za pomocą przegubów kulistych (sferycznych) lub krzyżakowych. Sterując jednocześnie zmianą długości wszystkich sześciu ramion, można zapewnić platformie sześć stopni swobody.
69
Wyszukiwarka
Podobne podstrony:
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
P1080203 3. Budowa robotów przemysłowych siywane do napędu następnych stopni swobody. W obudowie zna
P1080206 3. Budowa robotów przemysłowych Tablica 3.2. Specyfikacja techniczna wybranych profili firm
więcej podobnych podstron