HPIM0786
3. Budowa robotów przemysłowych
jednak być przewrócony przez silę F działającą w rogu A lub B% tak więc r mieszczenie ładunku jest tutaj bardzo istotne [80].
Na rysunku 3.47 przedstawiono konstrukcją czterokołowego robota a*, bifnego działającego wg schematu z rys. 2.4c [80].
3,6. Roboty mobilne
wózek odbiera paletę przedmiotową z magazynu wejściowego (stacji załadunkowej) i dostarcza ją do stanowisk znajdujących się przy maszynach. Na rysunku 3.49 pokazano widok takiego wózka AGV.
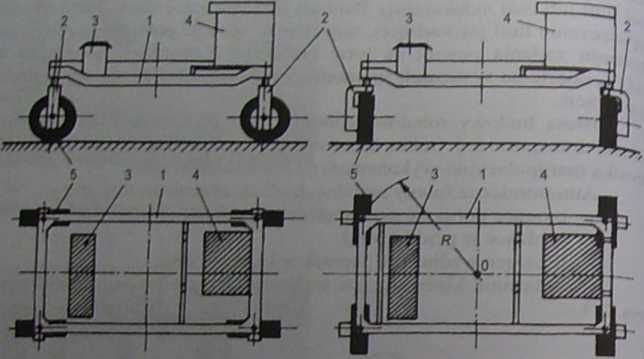
Rysunek 3.47 __________
Czterokołowy autonomiczny robot mobilny; 1 - rama, 2 - obracane zawieszenie kól, 3 - źródło energii. 4 - jednostka sterująca, 5 - koła
Tablica 3.3. Możliwości ruchowe robola z kolami typu Mecanum
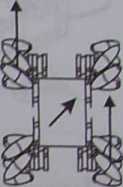
Do przodu
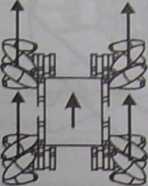
Wszystkie koła są napędzane z laką samą prędkością w tym samym kierunku.
W bok
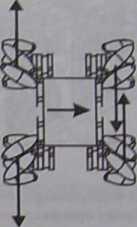
Wszystkie koła są napędzane z taką samą prędkością, lecz w przeciwnych kierunkach (lewe przednie + prawe tylne w jednym kierunku, prawe przednie + lewe tylne w przeciwnym).
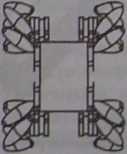
Po przekątnej
Dwa koła są napędzane z tą samą prędkością i w tym samym kierunku, dwa pozostałe są zahamowane.
Obroty wokół środków osi (przedniej bądź tylnej)
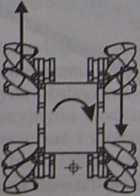
Koła jednej osi są napędzane z taką samą prędkością w przeciwnych kierunkach. Koła drugiej osi są zatrzymane.
Obrót wokół geometrycznego środka

Wszystkie kola są napędzane 7. taką samą prędkością, lecz w przeciwnych kierunkach (koła lewe w jednym kierunku, koła prawe w przeciwnym).
Dowolny ruch
Jest to nich. który wymaga sterowania prędkością obrotową każdego koła.
W takim przypadku możliwe jest odtworzenie dowolnego
toru.
Jest to autonomiczny robot mobilny o dużych możliwościach manewrowych. Kiedy pary kół są ustawione stycznie do okręgu o promieniu R robot obraca się w miejscu dookoła punktu 0.
Bardzo ciekawym rozwiązaniem jest robot MWR (ang. mecanum wheel robot), mogący poruszać się w dowolnym kierunku na płaszczyźnie. Jest to możliwe dzięki zastosowaniu czterech kół typu Mecanum. Koła te są zbudowane tak, że na piaście są rozmieszczone swobodnie obracające się rolki o takim kształcie, aby tworzącą koła była powierzchnia walcowa. Rolki obrócone są o kąt 45° względem osi głównej koła. Każde koło jest napędzane niezależnym silnikiem elektrycznym. Przez różne kombinacje prędkości obrotowych kół możliwe jest uzyskanie dowolnego kierunku poruszania się. Możliwości ruchowe robota zestawiono w tabl. 3.3.
Mechanizmy wewnętrzne wózka bezszynowego pokazano na rys. 3.48.
Istnieją różne rozwiązania załadunku i wyładunku wózków AGV. Do każdego z nich potrzebny jest na ogół specjalny wózek, palety oraz stacje załadunkowe i wyładunkowe. Najczęściej na wózku znajduje się mechanizm przemiesz-80 czający paletę, jest to tzw. aktywna stacja załadowczo/rozładowcza. Wtedy
Wyszukiwarka
Podobne podstrony:
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
P1080211 3. Budowa robotów przemysłowych wymiarowej przestrzeni, określonej przez trzy osie X, Y, Z,
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
Tadeusz SZKODNYKINEMATYKA ROBOTÓW PRZEMYSŁOWYCH Prędy siłowników wytworzone przez sterownik.
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0773 i. Budowa robotów priemyslowyth ■ 3.3. Roboty o budowie modułowej i szereguwej strukturze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
więcej podobnych podstron