HPIM0766

3. Budowa robotów przemysłowych

- w przypadku napędu elektrycznego — tyrystorowe lub tranzystorowkl układy zasilania silników lub układy prostownikowe oraz przemienniki 4 częstotliwości (falowniki), a także niezbędne układy przekaźnikowe. ^
Układ sterowania robota — szafa sterownicza zawiera zwykle:
- główny pulpit sterowniczy z przyciskami służącymi do uruchamiani^ ■ robota i ewentualnie ręcznego sterowania.
- przenośny sterownik ręczny połączony z szafą długim kablem, służący \ do programowania robota i doprowadzania do kolejnych punktów pracy, ■
w przypadku napędów
nik, pompę, filtry i cłx~.~ iu«
zbędny osprzęt hydrauliczny.
- jednostkę sterująco-logiczną (komputer), zawierającą pamięć operacyjną programów pracy robota i współpracującą przez układy wejścia- W -wyjścia (interfejsy) z:
♦ serwonapędami mechanizmu ruchu,
♦ układami pomiarowymi przemieszczeń,
♦ czujnikami położeń dwustanowych urządzeń robota (chwytaki, na- M rzędzia),
♦ czujnikami stanu pracy maszyn i urządzeń współpracujących z robo- \
tern.
Ze względu na bezpieczeństwo obsługi i wygodę napraw szafy układu za-
silania i sterowania są odsunięte od robota i znajdują się poza przestrzenią jego działania.
3.2. Roboty monolityczne o szeregowej strukturze kinematycznej
Wśród szeregowych jednostek kinematycznych robotów wyróżnia się kuka
(omówionych dalej) grup typowych rozwiązań charakteryzujących się w praktyce podobnym układem zespołów ruchu regionalnego i strukturą kinematy czną. Oprócz konstrukcji typowych w każdej grupie urządzeń są także rozwiązani; nietypowe.
3.2.1. Roboty o strukturze kinematycznej przegubowej
Na ryf

Roboty o strukturze kinematycznej przegubowej (rys. 3.1), nazywane rówr robotami przegubowymi lub manipulatorami obrotowymi, \ub antropomorj mmi. mają wszystkie obrotowe osie zespołów ruchu regionalnego. Roboty ^ gubowc z obrotowymi osiami przemieszczeń są na ogól wykonywane jako no stojące, lżejsze konstrukcyjnie, o mniejszym udźwigu. Roboty przegu1 znajdują bar *
robota przegubowego.
3.2. Roboty monolityczne o aerenowej strukturze kinematycznej
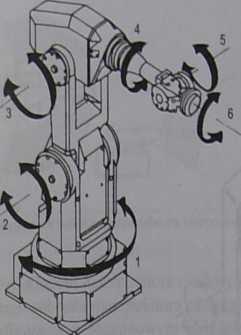
Rysunek 3.1 _____-------
Robot przegubowy z zaznaczonymi sześcioma osiami sterowanymi / + 6
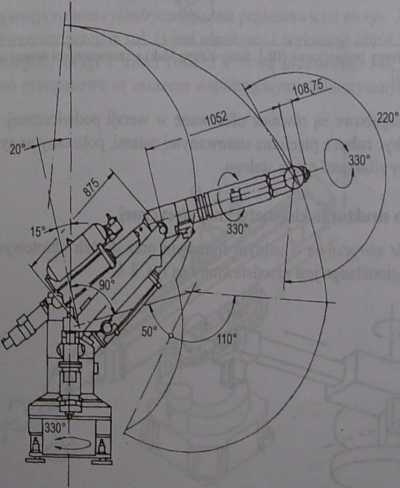
Rysunek 3.2__
Przestrzeń robocza robota przegubowego IR-L 28/6 [97]
41
Wyszukiwarka
Podobne podstrony:
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
P1080203 3. Budowa robotów przemysłowych siywane do napędu następnych stopni swobody. W obudowie zna
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0773 i. Budowa robotów priemyslowyth ■ 3.3. Roboty o budowie modułowej i szereguwej strukturze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
HPIM0827 Oi Napędy robotów przemysłowych Stosowanie napędu pneumatycznego w budowie jednostek kinema
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
więcej podobnych podstron