HPIM0775
3. Budowa robotów przemysłowych
Rysunek ~ . .' .. _;_ _
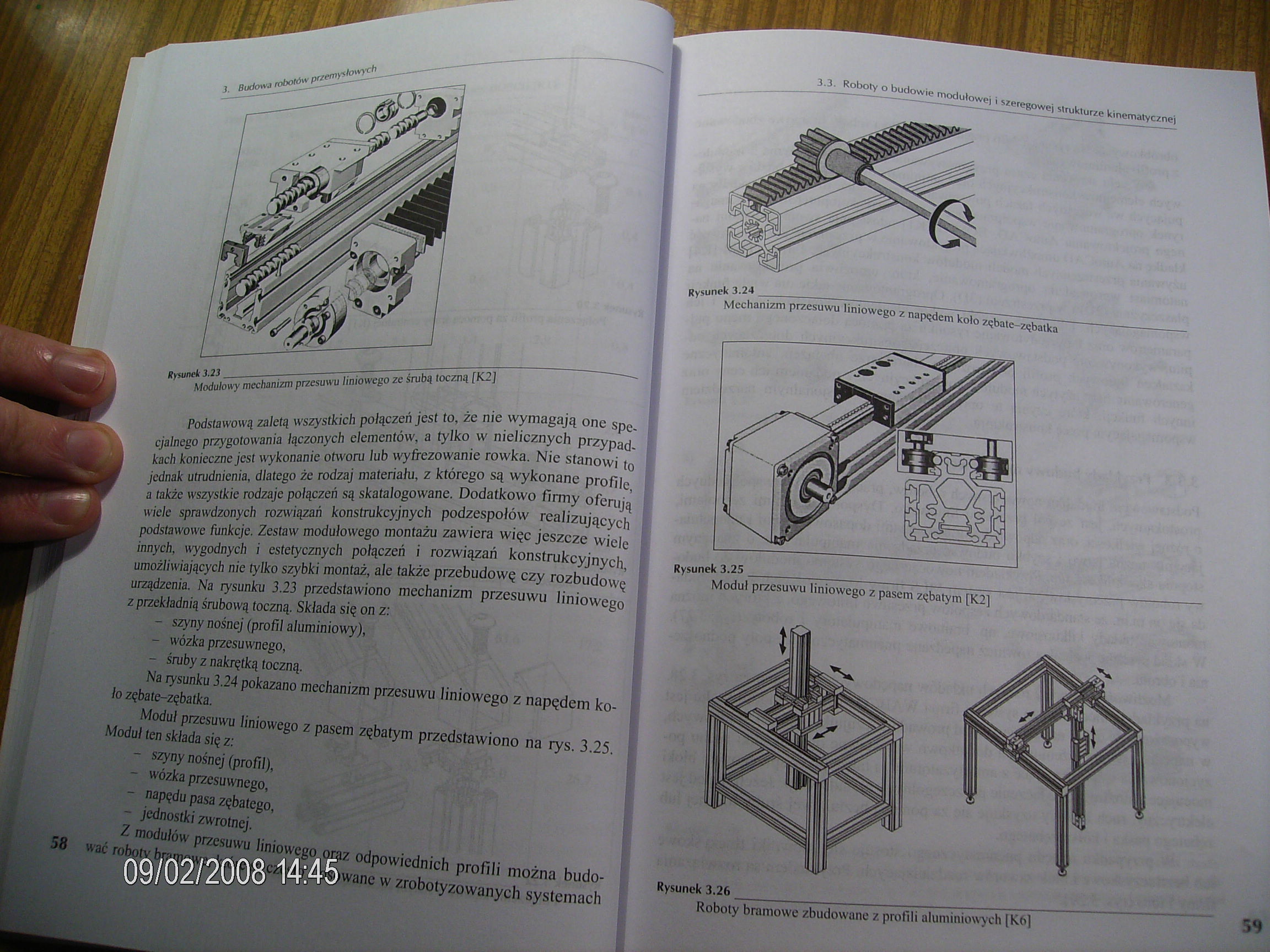
Modułowy mechanizm przesuwu liniowego ze śrubą toczną [K2]
Podstawową zaletą wszystkich połączeń jest to, że nie wymagają one specjalnego przygotowania łączonych elementów, a tylko w nielicznych przypadkach konieczne jest wykonanie otworu lub wyfrezowanie rowka. Nie stanowi to jednak utrudnienia, dlatego że rodzaj materiału, z którego są wykonane profile, a także wszystkie rodzaje połączeń są skatalogowane. Dodatkowo firmy oferują wiele sprawdzonych rozwiązań konstrukcyjnych podzespołów realizujących podstawowe funkcje. Zestaw modułowego montażu zawiera więc jeszcze wiele innych, wygodnych i estetycznych połączeń i rozwiązań konstrukcyjnych, . umożliwiających nie tylko szybki montaż, ale także przebudowę czy rozbudowę urządzenia. Na rysunku 3.23 przedstawiono mechanizm przesuwu liniowego I z przekładnią śrubową toczną. Składa się on z:
- szyny nośnej (profil aluminiowy),
- wózka przesuwnego,
- śruby z nakrętką toczną.
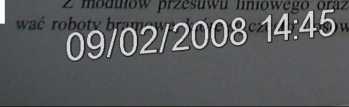
Na rysunku 3.24 pokazano mechanizm przesuwu liniowego z napędem ko- I ło zębate-zębatka.

Moduł przesuwu liniowego z pasem zębatym przedstawiono na rys. 3.25. ■ Moduł ten składa się z:
- szyny nośnej (profil),
- wózka przesuwnego,
- napędu pasa zębatego,
- jednostki zwrotnej.
VA tfW®)wanc w zrobotyzowanych systemach
odpowiednich profili można budo-

Rysunek 3.24
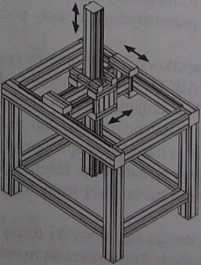
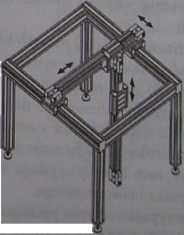
Rysunek 3.26
RobotjTbramowe zbudowane z profili aluminiowych [K6] ' ^
Wyszukiwarka
Podobne podstrony:
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
87439 P1080216 3. Budowa robotów przemysłowych Rysunek3.42 -
P1080212 3. Budowa robotów przemysłowych Platforma Rysunek 3.34_ Platforma Stewarta [ 107] Platforma
P1080205 3. Budowa robotów przemysłowych słowe, całe gniazda i linie produkcyjne, wieloosiowe maszyn
więcej podobnych podstron