HPIM0767

3; Budowa robolów przemysłowych
'Rysunek3.3?'' §£- | j • : . ___
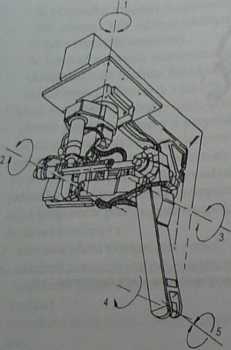
Robol przegubowy podwieszony (IR-L firmy Krupp Mak) z zaznaczonymi osiami sterowa. nymi J+J[97]
Roboty przegubowe są również oferowane w wersji podwieszonej. Przykładem może tu być robot z pięcioma sterowanymi osiami, pokazany na rys. 3.3. Jest on napędzany silnikami prądu stałego.
3.2.2. Roboty o strukturze kinematycznej sferycznej
Robot w układzie sferycznym o jednym liniowym oraz dwóch obrotowych zespołach ruchu regionalnego jest przedstawiony na tys. 3.4.
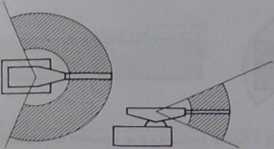
Rysunek 3.5______
Przestrzeń robocza manipulatora sferycznego [81]
Przykładem manipulatora o takiej konfiguracji jest manipulator Stanforda. Przestrzeń robocza manipulatora sferycznego jest przedstawiona na rys. 3.5. Jest to konfiguracja o biegunowym układzie osi współrzędnych oraz sferycznych przestrzeniach ruchu.
3.2.3. Roboty o strukturze kinematycznej cylindrycznej
Konfiguracja robota cylindrycznego jest przedstawiona na rys. 3.6.
Pierwszy przegub (oś 1) jest obrotowy i wykonuje obrót wokół podstawy, gdy przeguby drugi i trzeci (osie 2 i 3) są przesuwne. Jak sugeruje nazwa, zmienne przegubowe są zarazem współrzędnymi cylindrycznymi końcówki ro-
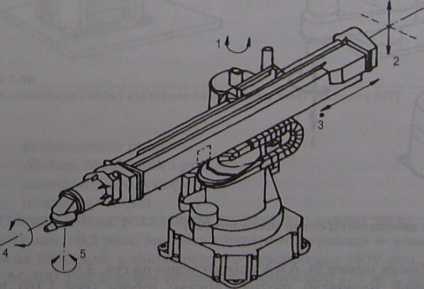
Rysunek 3.61! '! _______________________________
Robot o strukturze cylindrycznej przeznaczony do spawania i cięcia laserowego (97)
Wyszukiwarka
Podobne podstrony:
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
P1080200 3. Budowa robolów przemysłowych Rysunek 3.6_ PnwiiOT robocza manipnlainra sferycznego [115]
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
47937 P1080215 3. Budowa robotów przemysłowych Rysunek 3.40 __ Robot mobilny bramo
więcej podobnych podstron