HPIM0768

Budowa robolów przemysłowych

Rysunek 3.7 .
Przestrzeń robocza manipulatora cylindrycznego [81 ]
boczej względem podstawy. Konfiguracja cylindryczna ma walcowy układ ogj I współrzędnych oraz cylindryczne przestrzenie ruchu. Przestrzeń robocza jest 1 przedstawiona na rys. 3.7.
3.2.4. Roboty o strukturze kinematycznej SCARA

Robot o strukturze kinematycznej SCARA - rys. 3.8, zaprojektowano z myślą o zadaniach montażowych. Robot o konfiguracji SCARA ma trzy osie równoległe, dwie o ruchu obrotowym - osie 1 i 2, a jedną o postępowym - oś 3.
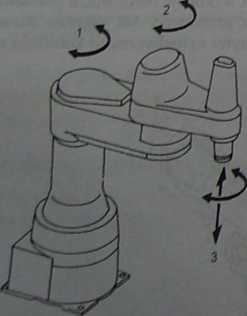
Rysunek 3.8 - ) ■ . . -
Robcd SCARA z zaznaczonymi osiami sterowania [97]
Przcstr/cń toboezĄ robota ^ na r^s‘ ^*9.
roboty (rys. 3.10) będące o kinematyce SCARA / podnośnikiem
4 pumowym. Są one wykorzystywane do:

Rysunek 3.9_
Przestrzeń robocza manipulatora SCARA [81]

Rysunek 3.10 _________________
Konstrukcja i układ osi robota M-400 firmy GMF Robotics [97]
- przenoszenia palet,
- obsługi obrabiarek i pras,
- montażu dużych części,
- transportu części.
Udźwig robota pokazanego na rysunku wynosi 50 kg, powtarzalność pozycjonowania ±0,5 mm, średnica obszaru manipulacji w płaszczyźnie poziomej jest równa 1930 mm, a zakres przesuwu pionowego 1850 mm. Podstawową zaletą robota M-400 jest znaczna przestrzeń manipulacji (14 m3), pizy małych wymiarach zajmowanej powierzchni. Serwosilniki zastosowane do napędu we wszystkich osiach zapewniają duże prędkości ruchu (oś / - 800 mm/s, osie 2,3 - 135°/s i nś 4 - 11 i<»Hnnn7<»4nic rinhre właściwości Hynnmic/ne_ _4i
Wyszukiwarka
Podobne podstrony:
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
P1080200 3. Budowa robolów przemysłowych Rysunek 3.6_ PnwiiOT robocza manipnlainra sferycznego [115]
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0781 3. Budowa robolów przemysłowych Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
więcej podobnych podstron