HPIM0781
3. Budowa robolów przemysłowych
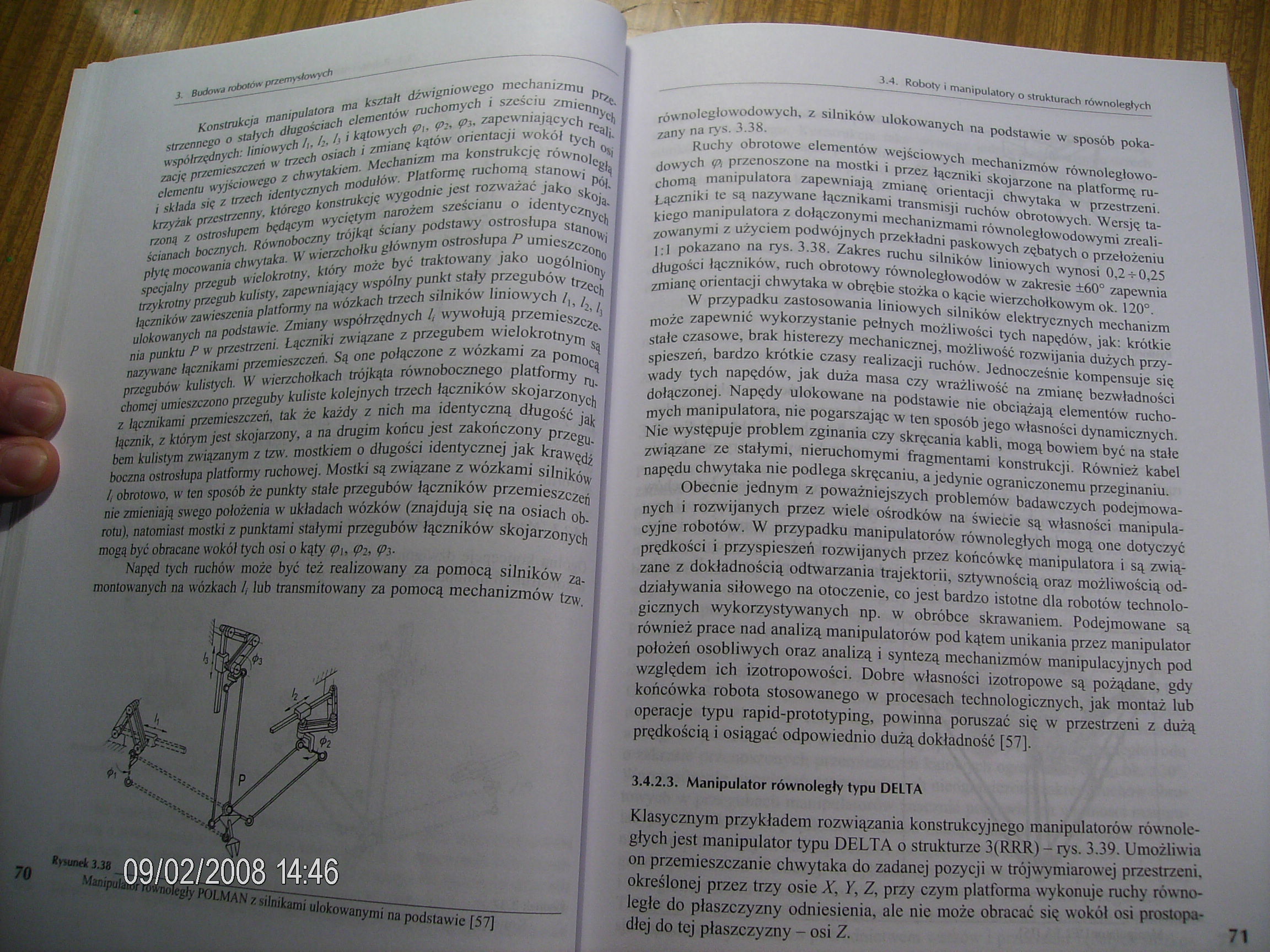
Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu strzenncgo o stałych długościach elementów ruchomych i sześciu zmieni współrzędnych: liniowych l\, /* lj i kątowych ę\, <py <ph zapewniających $ zację przemieszczeń w trzech osiach i zmianę kątów orientacji wokół tycu H elementu wyjściowego z chwytakiem. Mechanizm ma konstrukcję równole°S' i składa się z trzech identycznych modułów. Platformę ruchomą stanowi jS krzyżak przestrzenny, którego konstrukcję wygodnie jest rozważać jako sk0-rzoną z ostrosłupem będącym wyciętym narożem sześcianu o identycznJH ścianach bocznych. Równoboczny trójkąt ściany podstawy ostrosłupa stano? płytę mocowania chwytaka. W wierzchołku głównym ostrosłupa P umieszczo? specjalny przegub wielokrotny, który może być traktowany jako uogólnj0rUł I trzykrotny przegub kulisty, zapewniający wspólny punkt stały przegubów trzei łączników zawieszenia platformy na wózkach trzech silników liniowych /,, /2 . ulokowanych na podstawie. Zmiany współrzędnych | wywołują przemieszczą1 nia punktu P w przestrzeni. Łączniki związane z przegubem wielokrotnym s nazywane łącznikami przemieszczeń. Są one połączone z wózkami za pomoc! I przegubów kulistych. W wierzchołkach trójkąta równobocznego platformy I| I chomej umieszczono przeguby kuliste kolejnych trzech łączników skojarzonych I z łącznikami przemieszczeń, tak że każdy z nich ma identyczną długość jak I łącznik, z którym jest skojarzony, a na drugim końcu jest zakończony przegu. I bem kulistym związanym z tzw. mostkiem o długości identycznej jak krawędź I boczna ostrosłupa platformy ruchowej. Mostki są związane z wózkami silników I | obrotowo, w ten sposób że punkty stałe przegubów łączników przemieszczeń I nie zmieniają swego położenia w układach wózków (znajdują się na osiach ob-1 rotu), natomiast mostki z punktami stałymi przegubów łączników skojarzonych I mogą być obracane wokół tych osi o kąty tp\, M (py
Napęd tych ruchów może być też realizowany za pomocą silników za- I montowanych na wózkach 1 lub transmitowany za pomocą mechanizmów tzw. I
Kytunck 3.) Mm

POLMAN z silnikami ulokowanymi na podstawie [57]
O
■U
W

3.4. Roboty i manipulatory o strukturach równoległych
równoległowodowych, z silników ulokowanych na podstawie w sposób pokazany na rys. 3.38.
Ruchy obrotowe elementów wejściowych mechanizmów równoległowodowych przenoszone na mostki i przez łączniki skojarzone na platformę ruchomą manipulatora zapewniają zmianę orientacji chwytaka w przestrzeni. Łączniki te są nazywane łącznikami transmisji ruchów obrotowych. Wersję takiego manipulatora z dołączonymi mechanizmami równoległowodowymi zrealizowanymi z użyciem podwójnych przekładni paskowych zębatych o przełożeniu 1:1 pokazano na rys. 3.38. Zakres ruchu silników liniowych wynosi 0,2 + 0,25 długości łączników, ruch obrotowy równoległowodów w zakresie ±60° zapewnia zmianę orientacji chwytaka w obrębie stożka o kącie wierzchołkowym ok. 120°.
W przypadku zastosowania liniowych silników elektrycznych mechanizm może zapewnić wykorzystanie pełnych możliwości tych napędów, jak: krótkie stałe czasowe, brak histerezy mechanicznej, możliwość rozwijania dużych przyspieszeń, bardzo krótkie czasy realizacji ruchów. Jednocześnie kompensuje się wady tych napędów, jak duża masa czy wrażliwość na zmianę bezwładności dołączonej. Napędy ulokowane na podstawie nie obciążają elementów ruchomych manipulatora, nie pogarszając w ten sposób jego własności dynamicznych. Nie występuje problem zginania czy skręcania kabli, mogą bowiem być na stałe związane ze stałymi, nieruchomymi fragmentami konstrukcji. Również kabel napędu chwytaka nie podlega skręcaniu, a jedynie ograniczonemu przeginaniu.
Obecnie jednym z poważniejszych problemów badawczych podejmowanych i rozwijanych przez wiele ośrodków na świecie są własności manipulacyjne robotów. W przypadku manipulatorów równoległych mogą one dotyczyć prędkości i przyspieszeń rozwijanych przez końcówkę manipulatora i są związane z dokładnością odtwarzania trajektorii, sztywnością oraz możliwością oddziaływania siłowego na otoczenie, co jest bardzo istotne dla robotów technologicznych wykorzystywanych np. w obróbce skrawaniem. Podejmowane są również prace nad analizą manipulatorów pod kątem unikania przez manipulator położeń osobliwych oraz analizą i syntezą mechanizmów manipulacyjnych pod względem ich izotropowości. Dobre własności izotropowe są pożądane, gdy końcówka robota stosowanego w procesach technologicznych, jak montaż lub operacje typu rapid-prototyping, powinna poruszać się w przestrzeni z dużą prędkością i osiągać odpowiednio dużą dokładność [57].
3.4.2.3. Manipulator równoległy typu DELTA
KJasycznym przykładem rozwiązania konstrukcyjnego manipulatorów równoległych jest manipulator typu DELTA o strukturze 3(RRR) — rys. 3.39. Umożliwia on przemieszczanie chwytaka do zadanej pozycji w trójwymiarowej przestrzeni, określonej przez trzy osie X, Y, Z, przy czym platforma wykonuje ruchy równoległe do płaszczyzny odniesienia, ale nie może obracać się wokół osi prostopadłej do tej płaszczyzny — osi Z. 71
Wyszukiwarka
Podobne podstrony:
HPIM0768 Budowa robolów przemysłowych Rysunek 3.7 . Przestrzeń robocza manipulator
HPIM0767 3; Budowa robolów przemysłowych Rysunek3.3? §£-
HPIM0783 3. Budowa robotów przemysłowych 3.5. Roboty i manipulatory o strukturach hybrydowych wych.
HPIM0766 3. Budowa robotów przemysłowych - w przypadku napędu elektrycznego — tyry
HPIM0769 3. Budowa robotów przemysłowych 3.2.5. Roboty o strukturze kinematycznej PUMA Robot PUMA je
HPIM0771 3. Budowa robotów przemysłowych ———--- W 01460 Rysunek
HPIM0775 3. Budowa robotów przemysłowych Rysunek ~ . .
HPIM0779 I 3. Budowa robotów przemystowyt-b Rywnrt 3.32 .. _—— pjailic mtnipulator
HPIM0780 3. Budowa robotów przemysłowych Rysunek 3.34 _____________ Platforma Stewarta [80] Dla prze
HPIM0784 3. Budowa robotów przemysłowych Rysunek 3.42_____________ Robot o stroktuize hybrydowej typ
HPIM0786 3. Budowa robotów przemysłowych jednak być przewrócony przez silę F działającą w rogu A lub
HPIM0787 3. Budowa robotów przemysłowych Rysunek 148___ Mechanizmy wewnętrzne wózka bezszynowego: /
52629 P1080213 1. Budowa robotów przemysłowych3.5. Roboty i manipulatory o strukturach hybrydowych W
P1080197 .1. Budowa robolów przemysłowych - jednostkę stcrująco-logiczną (komputer), zawierającą pam
P1080200 3. Budowa robolów przemysłowych Rysunek 3.6_ PnwiiOT robocza manipnlainra sferycznego [115]
więcej podobnych podstron